import stuff¶
In [1]:
%matplotlib inline
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
import sympy as sp
customize figure¶
In [8]:
plt.ioff()
fig = plt.figure(1, figsize=(10,7)) # figsize accepts only inches.
fig.subplots_adjust(left=0.10, right=0.97, top=0.82, bottom=0.10,
hspace=0.02, wspace=0.02)
ax = fig.add_subplot(111)
params = {'backend': 'ps',
'axes.labelsize': 22,
'legend.fontsize': 16,
'legend.handlelength': 2.5,
'legend.borderaxespad': 0,
'xtick.labelsize': 22,
'ytick.labelsize': 16,
'font.family': 'serif',
'font.size': 22,
# Times, Palatino, New Century Schoolbook,
# Bookman, Computer Modern Roman
# 'font.serif': ['Times'],
'ps.usedistiller': 'xpdf',
'text.usetex': True,
# include here any neede package for latex
'text.latex.preamble': [r'\usepackage{amsmath}',
],
}
plt.rcParams.update(**params)
/Users/yairmau/anaconda3/lib/python3.6/site-packages/matplotlib/cbook/deprecation.py:106: MatplotlibDeprecationWarning: Adding an axes using the same arguments as a previous axes currently reuses the earlier instance. In a future version, a new instance will always be created and returned. Meanwhile, this warning can be suppressed, and the future behavior ensured, by passing a unique label to each axes instance. warnings.warn(message, mplDeprecation, stacklevel=1)
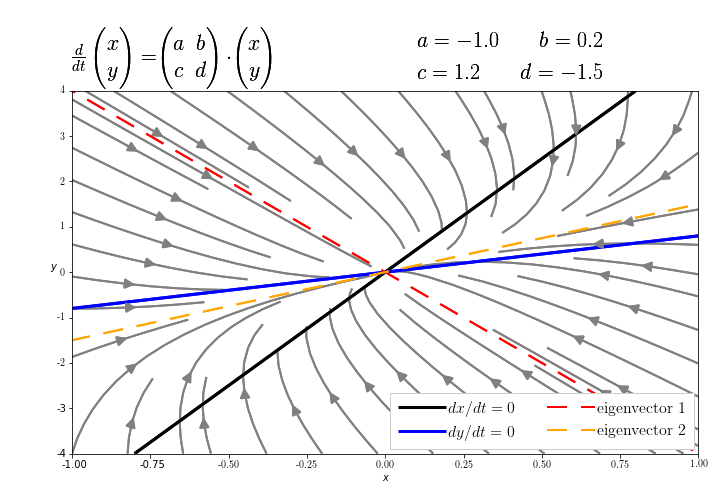
define system of equations¶
$$ \frac{dx}{dt} = ax + by\\ \frac{dy}{dt} = cx + dy $$In [9]:
# parameters as a dictionary
p = {'a': -1.0, 'b': +0.2,
'c': +1.2, 'd': -1.5}
# the equations
def system_equations(x,y):
return [p['a'] * x + p['b'] * y,
p['c'] * x + p['d'] * y,
]
streamplot configuration¶
In [10]:
min_x, max_x = [-1, 1]
min_y, max_y = [-4, 4]
div = 50
X, Y = np.meshgrid(np.linspace(min_x, max_x, div),
np.linspace(min_y, max_y, div))
density = 2 * [0.80]
minlength = 0.2
arrow_color = 3 * [0.5]
ax.streamplot(X, Y, system_equations(X, Y)[0], system_equations(X, Y)[1],
density=density, color=arrow_color, arrowsize=2,
linewidth=2, minlength=minlength)
Out[10]:
<matplotlib.streamplot.StreamplotSet at 0x1120e64e0>
nullclines¶
Plot the nullclines, i.e., the curves for which the right-hand side of the differential equations is zero. $$ \frac{dx}{dt} = 0 = n_1(x,y) = ax + by\\ \frac{dy}{dt} = 0 = n_2(x,y) = cx + dy $$
In [11]:
null_0 = ax.contour(X, Y, system_equations(X, Y)[0],
levels=[0], colors='black', linewidths=3)
null_1 = ax.contour(X, Y,system_equations(X, Y)[1],
levels=[0], colors='blue', linewidths=3)
n0 = null_0.collections[0]
n1 = null_1.collections[0]
eigenvectors¶
In [12]:
a, b, c, d = sp.symbols('a b c d')
Jacobian = sp.Matrix([[a, b],[c, d]])
ev1 = sp.lambdify((a, b, c, d), list(Jacobian.eigenvects())[0][2][0][0], dummify=False)
ev2 = sp.lambdify((a, b, c, d), list(Jacobian.eigenvects())[1][2][0][0], dummify=False)
eigen_vec = 100 * np.array([[ev1(**p), 1.0],
[ev2(**p), 1.0]])
eigen_0, = ax.plot([eigen_vec[0, 0],-eigen_vec[0, 0]],
[eigen_vec[0, 1],-eigen_vec[0, 1]],
color='red', lw=2, ls="--")
eigen_1, = ax.plot([eigen_vec[1, 0],-eigen_vec[1, 0]],
[eigen_vec[1, 1],-eigen_vec[1, 1]],
color='orange', lw=2, ls="--")
dash = (10, 7, 10, 7)
eigen_0.set_dashes(dash)
eigen_1.set_dashes(dash)
some labels, legend, and text¶
In [13]:
ax.set_ylabel(r"$y$", rotation='horizontal')
ax.set_xlabel(r"$x$", labelpad=5)
ax.legend([n0, n1, eigen_0, eigen_1],
[r'$dx/dt=0$', r'$dy/dt=0$',
"eigenvector 1", "eigenvector 2"],
loc="lower right",
frameon=True, fancybox=False, shadow=False, ncol=2,
borderpad=0.5, labelspacing=0.5, handlelength=3, handletextpad=0.1,
borderaxespad=0.3, columnspacing=2, framealpha=1.0)
ax.text(-1.0, 4.3, (r"$\frac{d}{dt}\begin{pmatrix}x\\y\end{pmatrix}=$"
r"$\begin{pmatrix}a&b\\c&d\end{pmatrix}\cdot$"
r"$\begin{pmatrix}x\\y\end{pmatrix}$"))
ax.text(0.1, 5.0, r"$a={:.1f}\qquad b={:.1f}$\\".format(p['a'], p['b']))
ax.text(0.1, 4.3, r"$c={:.1f}\qquad d={:.1f}$\\".format(p['c'], p['d']))
ax.axis([min_x, max_x, min_y, max_y])
fig.savefig("./figures/linear-system.png", resolution=300)
plt.draw()
fig
Out[13]:

In [ ]: