In [1]:
%pylab inline
Populating the interactive namespace from numpy and matplotlib
In [2]:
import torch
from torch import nn
from torchmore import flex, layers
APPLICATIONS TO OCR¶
Character Recognition¶
- assuming you have a character segmentation
- extract each character
- feed to any of these architectures as if it were an object recognition problem
Goodfellow, Ian J., et al. "Multi-digit number recognition from street view imagery using deep convolutional neural networks." arXiv preprint arXiv:1312.6082 (2013).
Whole Word Recognition¶
- perform word localization using Faster RCNN
- perform whole word recognition as if it were a large object reconition problem
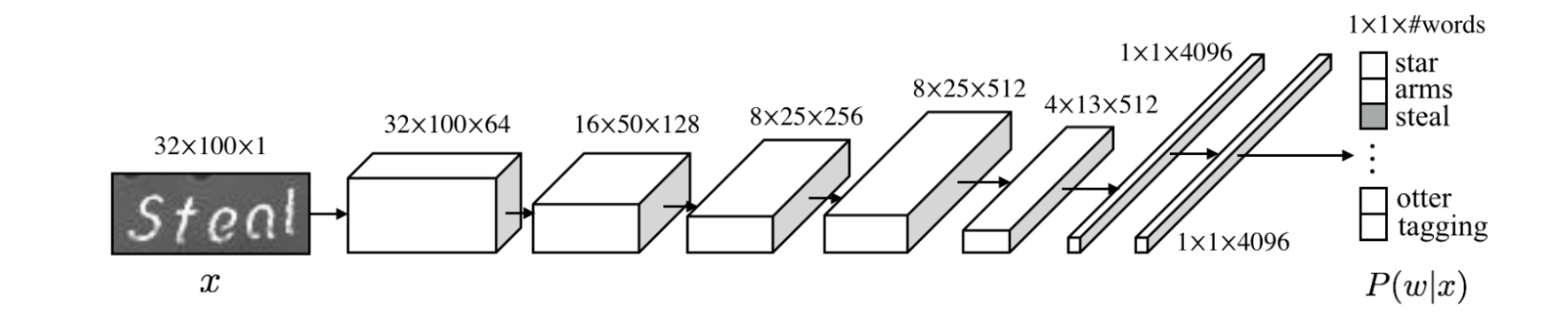
Jaderberg, Max, et al. "Deep structured output learning for unconstrained text recognition." arXiv preprint arXiv:1412.5903 (2014).
Better Techniques¶
- above techniques are applications of computer vision localization
- Faster RCNN and similar techniques are ad hoc and limited
- often require pre-segmented text for training
- better approaches:
- use markers for localizing/bounding text (later)
- use sequence learning techniques and CTC
Convolutional Networks for OCR¶
Historically, LSTM came first, but we're going to start off with convolutional networks analogous to object recognition networks.
Structure:
- perform 2D convolutions over the entire image
- assume that that has extracted features that correspond to characters
- project those features into a 1D sequence
- classify the projected 1D feature sequence into characters
- perform training using EM alignment (CTC, Viterbi, etc.)
Convolutional Networks for OCR¶
In [3]:
def make_model():
return nn.Sequential(
# BDHW
*convolutional_layers(),
# BDHW, now reduce along the vertical
layers.Fun(lambda x: x.sum(2)),
# BDW
layers.Conv1d(num_classes, 1)
)
Viterbi Training¶
- ground truth: text string = sequence of classes
- ground truth
"ABC"is replaced by regular expression/_+A+_+B+_+C+_+/ - network outputs $P(c|i)$, a probability of each class $c$ at each position $i$
- find the best possible alignment between network outputs and ground truth regex
- that alignment gives an output for each time step
- treat that alignment as if it were the ground truth and backpropagate
- this is an example of an EM algorithm
CTC Training¶
- like Viterbi training, but instead of finding the best alignment uses an average alignment
Identical to traditional HMM training in speech recognition:
- Viterbi training = Viterbi training
- CTC training = forward-backward algorithm
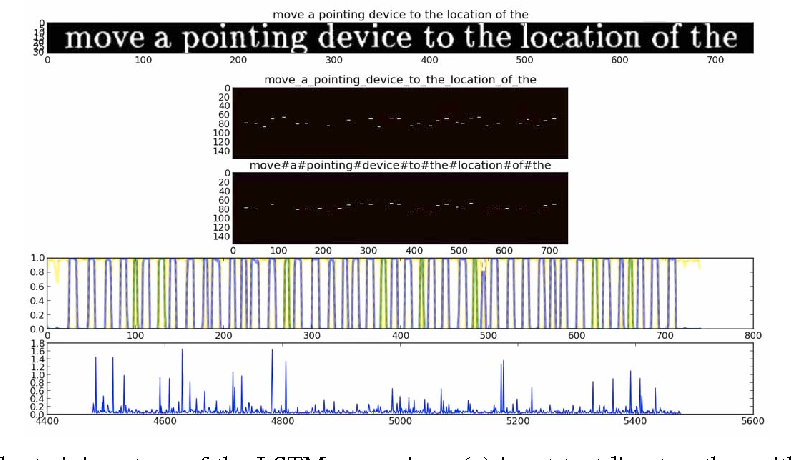
CTC training with cctc2¶
- with the
cctc2library, we can make the alignment explicit
In [4]:
def train_batch(input, target):
optimizer.zero_grad()
output = model(input)
aligned = cctc2.align(output, target)
loss = mse_loss(aligned, output)
loss.backward()
optimizer.step()
Explicit CTC¶
CTC in PyTorch¶
- in PyTorch, CTC is implemented as a loss function
CTCLossin PyTorch obscures what's going on- all you get is the loss output, not the EM alignment
- sequences are packed in a special way into batches
In [5]:
ctc_loss = nn.CTCLoss()
def train_batch(input, target):
optimizer.zero_grad()
output = model(input)
loss = ctc_loss(output, target)
loss.backward()
optimizer.step()
Word / Text Line Recognition¶
In [6]:
def make_model():
return nn.Sequential(
*convolutional_layers(),
layers.Fun(lambda x: x.sum(2)),
layers.Conv1d(num_classes, 1)
)
def train_batch(input, target):
optimizer.zero_grad()
output = model(input)
loss = ctc_loss(output, target)
loss.backward()
optimizer.step()
VGG-Like Model¶
In [7]:
def conv2d(d, r=3, stride=1, repeat=1):
"""Generate a conv layer with batchnorm and optional maxpool."""
result = []
for i in range(repeat):
result += [
flex.Conv2d(d, r, padding=(r//2, r//2), stride=stride),
flex.BatchNorm2d(),
nn.ReLU()
]
return result
def conv2mp(d, r=3, mp=2, repeat=1):
"""Generate a conv layer with batchnorm and optional maxpool."""
result = conv2d(d, r, repeat=repeat)
if mp is not None:
result += [nn.MaxPool2d(mp)]
return result
def project_and_conv1d(d, noutput, r=5):
return [
layers.Fun("lambda x: x.max(2)[0]"),
flex.Conv1d(d, r, padding=r//2),
flex.BatchNorm1d(),
nn.ReLU(),
flex.Conv1d(noutput, 1),
layers.Reorder("BDL", "BLD")
]
class Additive(nn.Module):
def __init__(self, *args, post=None):
super().__init__()
self.sub = nn.ModuleList(args)
self.post = None
def forward(self, x):
y = self.sub[0](x)
for f in self.sub[1:]:
y = y + f(x)
if self.post is not None:
y = self.post(y)
return y
In [8]:
def make_vgg_model(noutput=53):
return nn.Sequential(
layers.Input("BDHW", sizes=[None, 1, None, None]),
*conv2mp(100, 3, 2, repeat=2),
*conv2mp(200, 3, 2, repeat=2),
*conv2mp(300, 3, 2, repeat=2),
*conv2d(400, 3, repeat=2),
*project_and_conv1d(800, noutput)
)
make_vgg_model()(torch.rand(1, 1, 60, 400)).shape
Out[8]:
torch.Size([1, 50, 53])
Resnet-Block¶
- NB: we can easily define Resnet etc. in an object-oriented fashion
In [9]:
def ResnetBlock(d, r=3):
return Additive(
nn.Identity(),
nn.Sequential(
nn.Conv2d(d, d, r, padding=r//2), nn.BatchNorm2d(d), nn.ReLU(),
nn.Conv2d(d, d, r, padding=r//2), nn.BatchNorm2d(d)
)
)
def resnet_blocks(n, d, r=3):
return [ResnetBlock(d, r) for _ in range(n)]
Resnet-like Model¶
In [10]:
def make_resnet_model(noutput=53):
return nn.Sequential(
layers.Input("BDHW", sizes=[None, 1, None, None]),
*conv2mp(64, 3, (2, 1)),
*resnet_blocks(5, 64), *conv2mp(128, 3, 2),
*resnet_blocks(5, 128), *conv2mp(256, 3, 2),
*resnet_blocks(5, 256), *conv2mp(512, 3, 2),
*resnet_blocks(5, 512),
*project_and_conv1d(800, noutput)
)
make_resnet_model()(torch.rand(1, 1, 60, 400)).shape
Out[10]:
torch.Size([1, 50, 53])
Footprints¶
- even with projection/1D convolution, a character is first recognized in 2D by the 2D convolutional network
- character recognition with 2D convolutional networks really a kind of deformable template matching
- in order to recognize a character, each pixel at the output of the 2D convolutional network needs to have a footprint large enough to cover the character to be recognized
- footprint calculation:
- 3x3 convolution, three maxpool operations = 24x24 footprint
Conv-Only Training¶

Problems with VGG/Resnet+Conv1d¶
Problem:
- reduces output to H/8, W/8
- CTC alignment needs two pixels for each character
- result: models trouble with narrow characters
Solutions:
- use fractional max pooling
- use upscaling
- use transposed convolutions
Less Downscaling using FractionalMaxPool2d¶
- permits more max pooling steps without making image too small
- can be performed anisotropically
- necessary non-uniform spacing may have additional benefits
In [11]:
def conv2fmp(d, r=3, fmp=(0.7, 0.85), repeat=1):
result = conv2d(d, r, repeat=repeat)
if fmp is not None:
result += [nn.FractionalMaxPool2d(3, output_ratio=fmp)]
return result
def make_fmp_model(noutput=53):
return nn.Sequential(
layers.Input("BDHW", sizes=[None, 1, None, None]),
*[l for d in [50, 100, 150, 200, 250, 300] for l in conv2fmp(d, 3, (0.7, 0.9))],
*project_and_conv1d(800, noutput)
)
make_fmp_model()(torch.rand(1, 1, 60, 400)).shape
Out[11]:
torch.Size([1, 210, 53])
Upscaling using interpolate¶
interpolatescales an image, hasbackward()MaxPool2d...interpolateis a simple multiscale analysis- can be combined with loss functions at each level
In [12]:
import torch.nn.functional as F
def make_interpolating_model(noutput=53):
return nn.Sequential(
layers.Input("BDHW", sizes=[None, 1, None, None]),
*conv2mp(50, 3), *conv2mp(100, 3), *conv2mp(150, 3), *conv2mp(200, 3),
layers.Fun_(lambda x: F.interpolate(x, scale_factor=16)),
*project_and_conv1d(800, noutput)
)
make_interpolating_model()(torch.rand(1, 1, 60, 400)).shape
Out[12]:
torch.Size([1, 400, 53])
Upscaling with interpolate¶

Upscaling using ConvTranspose1d¶
ConvTranspose2dfills in higher resolutions with "templates"- commonly used in image segmentation and superresolution
In [13]:
def make_ct_model(noutput=53, ct=1):
return nn.Sequential(
layers.Input("BDHW", sizes=[None, 1, None, None]),
*conv2mp(50, 3),
*conv2mp(100, 3),
*conv2mp(150, 3),
*conv2mp(200, 3),
layers.Fun("lambda x: x.sum(2)"), # BDHW -> BDW
*[flex.ConvTranspose1d(800, 1, stride=2)]*ct,
flex.Conv1d(noutput, 7, padding=3)
)
print(make_ct_model()(torch.rand(1, 1, 60, 400)).shape)
print(make_ct_model(ct=0)(torch.rand(1, 1, 60, 400)).shape)
torch.Size([1, 53, 49]) torch.Size([1, 53, 25])
How well do these work?¶
- Works for word or text line recognition.
- All these models only require that characters are arranged left to right.
- Input images can be rotated up to around 30 degrees and scaled.
- Input images can be grayscale.
- Great for scene text and degraded documents.
But:
- You pay a price for translation/scale inv: lower performance.
- These don't use any recurrent networks, so all information flow is strictly limited to the footprint.