オリジナルの作成:2014/11/16
0D-LPC810でI2Cデバイスの値を取得する¶
勉強会の参加者で、I2Cのデバイスを使ってパソコンにデータを送る小さなアダプターあると便利という ご意見があり、LPC810を使って試してみようと思います。
ここで、紹介しているプログラムは、Githubにlbed/LBED_LPC810から取得できます。
LPC810を使ったI2Cデバイスのシリアル読み込みプログラム¶
サンプリングレートが1秒間に1回程度なので、パソコンへはGPIOを使ったソフトシリアルで通信します。
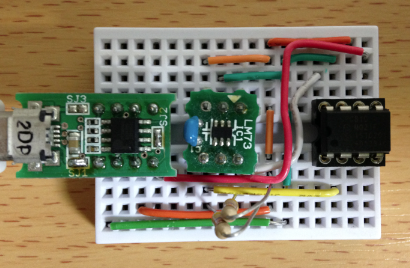
LPC810の5番ピンをソフトシリアルの送信用に使用します。 LM73を使って温度センサーの値をシリアルに送信ガジェットをブレッドボードに組みました。
変なエラー¶
どうもI2Cデバイスからの応答が2回目以降表示されない、奇妙なバグが発生しました。
こんな時には、プロトコルアナライザとして購入しておいたLabToolの出番です。
LabToolでデバッグ¶
ターゲットデバイスとLabToolの結線を以下に示します。
ここでは、D1, D2にSDA, SCLを接続しました。
| LabTool | LPC810 |
|---|---|
| D1: 茶 | 8: SDA |
| D2: 赤 | 2: SCL |
LabToolを起動し、Newを選択する。 Add Signalをクリックし、D1, D2をチェックし、Analyzers:でI2C Analyzerを選択する。

I2C AnalyzerでSDAにD1, SCLにD2を選択し、Synchronize: Triggerを選択する

Analyzerの結果¶
デバッガでI2C関連の関数でブレークポイントをセットし、
- 初期化
- 1回目の読み込み
- 2回目の読み込み
をアナライザーに掛けてみると以下のようになりました。
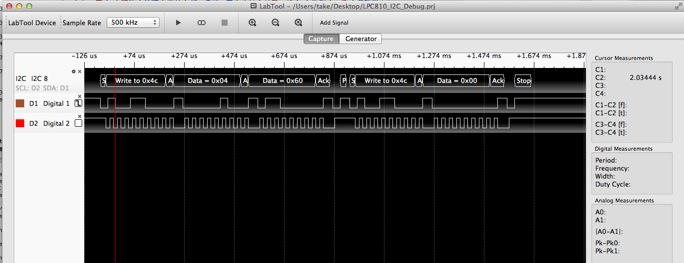
初期化は、プログラム通りの動きを確認
- 0x4CのアドレスにData 0x04, 0x60を書き込み
- 0x4CのアドレスにData 0x00を書き込む
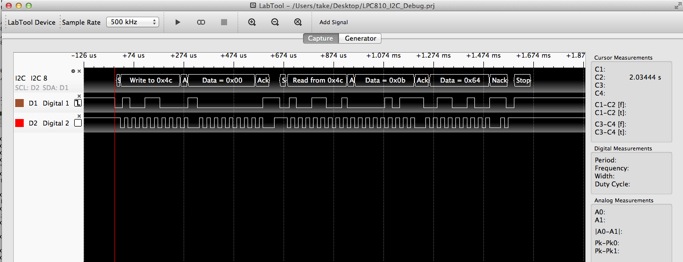
1回目の読み込みでは、
- 0x4Cのアドレスに0x00を送ると
- 0x4Cのアドレスから0x0b, 0x64が返される
一方2回目の読み込みでは、
0x4Cのアドレスに0x10を送って、ここで止まっている。

障害の原因¶
これまで何回も使っていたLM73::readメソッドにバグがあることが判明しました。 送信用のコマンド0x00をセットするのを忘れていた。
int LM73::read()
{
char cmd[2];
// cmdの1バイト目を0をセットし忘れている。2014/11/16発見
cmd[0] = 0;
i2c.read( LM73_ADDR, cmd, 2); // Send command string
int int_val = cmd[0] <<1 | cmd[1]>>7;
int ceil_val = ((cmd[1] & 0x7f)*200) >>8;
return (int_val*10 + ceil_val/10);
}
完成したI2Cからシリアルへの送信プログラム¶
LPC810では、float型を使用すると急にプログラムサイズが大きくなるため、 温度センサーLM73の戻り値を小数点1桁までの温度を整数とする値に変更しました。
以下にI2Cから読み込んだ値をシリアルに送信するプログラムを示します。 このプログラムは、I2CデバイスLM73から値を読み取り、シリアルに4800ボーで送信する 簡単なものです。
#include "lbed.h"
#include "SoftSerialTxOnly.h"
#include "LPC8xx.h"
// 4800bps
#define SERIAL_TIME_PER_BIT1 105
#define SERIAL_TIME_PER_BIT2 104
SoftSerialTxOnly::SoftSerialTxOnly(PinName pin) : _out(pin) {
}
int SoftSerialTxOnly::_putc(int value) {
uint8_t data = value;
_out = 0;
wait_us(SERIAL_TIME_PER_BIT1);
uint8_t i;
for (int cnt = 0, i=0x01; cnt < 8; i<<=1, cnt++) {
if (data & i)
_out = 1;
else
_out = 0;
wait_us(SERIAL_TIME_PER_BIT2);
}
_out = 1;
wait_us(SERIAL_TIME_PER_BIT1);
return value;
}
メインのプログラムは、以下の通りです。
/*
SoftSerialTxOnly
I2CデバイスLM73から値を読み取り、シリアルに4800ボーで送信する
*/
#ifdef __USE_CMSIS
#include "LPC8xx.h"
#endif
#include <cr_section_macros.h>
#include "lbed.h"
#include "SoftSerialTxOnly.h"
#include "LM73.h"
int main(void) {
// lbedライブラリの初期化
lbed_setup();
/* I2C用スイッチマトリックスの設定 */
I2C_SwitchMatrix_Init();
// 8番ピンSDA, 2番ピンSCL
LM73lm73(P8, P2);
// 5番ピンをURARTのRxに接続
SoftSerialTxOnly pc(P5);
pc.println("Hello World\n");
while(1) {
pc.print("temp=");
//pc.print(lm73.read(), 2);
// floatを使うとサイズオーバーになるので、0.1度までを整数で出力
int v = lm73.read();
pc.print(v, DEC);
pc.println();
wait_ms(1000);// 1秒待つ
}
return 0 ;
}