Agent, RL and MultiEnvironment¶
It is recommended to have a look at the 0_basic_functionalities, 1_Observation_Agents and 2_Action_GridManipulation and especially 3_TrainingAnAgent notebooks before getting into this one.
Objectives
In this notebook we will expose :
- what is a "MultiEnv"
- how can it be used with an agent
- how can it be used to train a agent that uses different environments
res = None
try:
from jyquickhelper import add_notebook_menu
res = add_notebook_menu()
except ModuleNotFoundError:
print("Impossible to automatically add a menu / table of content to this notebook.\nYou can download \"jyquickhelper\" package with: \n\"pip install jyquickhelper\"")
res
import grid2op
from grid2op.Reward import ConstantReward, FlatReward
from tqdm.notebook import tqdm
from grid2op.Runner import Runner
import sys
import os
import numpy as np
TRAINING_STEP = 100
I) Download more data for the default environment.¶
A lot of data have been made available for the default "case14_redisp" environment. Including this data in the package is not convenient. We chose instead to release them and make them easily available with a utility. To download them in the default directory ("~/data_grid2op/case14_redisp") on linux based system you can do the following (uncomment the following command)
# !$sys.executable -m grid2op.download --name "case14_realistic"
I) Make a regular environment and agent¶
Now that we downloaded the dataset, it is time to make an environment that will use all the data avaiable. You can execute the following command line. If you see any error or warning consider re downloading the data, or adapting the key-word argument "chronics_path" to match the path where the data have been downloaded.
env = grid2op.make_new("rte_case14_realistic", test=True)
/home/donnotben/Documents/Grid2Op_dev/getting_started/grid2op/MakeEnv/MakeNew.py:139: UserWarning: You are using a development environment. This is really not recommended for training agents.
A lot of data have been made available for the default "rte_case14_realistic" environment. Including this data in the package is not convenient.
We chose instead to release them and make them easily available with a utility. To download them in the default directory ("~/data_grid2op/case14_redisp") just pass the argument "test=False" (or don't pass anything else) as local=False is the default value. It will download approximately 300Mo of data.
II) Train a standard RL Agent¶
Make sure you are using a computer with at least 4 cores if you want to notice some speed-ups.
from grid2op.Environment import MultiEnvironment
from grid2op.Agent import DoNothingAgent
NUM_CORE = 8
IIIa) Using the standard open AI gym loop¶
Here we demonstrate how to use the multi environment class. First let's create a multi environment.
# create a simple agent
agent = DoNothingAgent(env.action_space)
# create the multi environment class
multi_envs = MultiEnvironment(env=env, nb_env=NUM_CORE)
A multienvironment is just like a regular environment but instead of dealing with one action, and one observation, is requires to be sent multiple actions, and returns a list of observations as well.
It requires a grid2op environment to be initialized and creates some specific "workers", each a replication of the initial environment. None of the "worker" can be accessed directly. Supported methods are:
- multi_env.reset
- multi_env.step
- multi_env.close
That have similar behaviour to "env.step", "env.close" or "env.reset".
It can be used the following manner.
# initiliaze some variable with the proper dimension
obss = multi_envs.reset()
rews = [env.reward_range[0] for i in range(NUM_CORE)]
dones = [False for i in range(NUM_CORE)]
obss
array([<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f733c7b1550>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f733c7ce828>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f733c7b1710>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f733c7b14e0>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f733c7b17b8>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f737a22ff60>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f733c7b1d68>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f737a22ff98>],
dtype=object)
dones
[False, False, False, False, False, False, False, False]
As you can see, obs is not a single obervation, but a list (numpy nd array to be precise) of 4 observations, each one being an observation of a given "worker" environment.
Worker environments are always called in the same order. It means the first observation of this vector will always correspond to the first worker environment.
Similarly to Observation, the "step" function of a multi_environment takes as input a list of multiple actions, each action will be implemented in its own environment. It returns a list of observations, a list of rewards, and boolean list of whether or not the worker environment suffer from a game over (in that case this worker environment is automatically restarted using the "reset" method.)
Because orker environments are always called in the same order, the first action sent to the "multi_env.step" function will also be applied on this first environment.
It is possible to use it as follow:
# initialize the vector of actions that will be processed by each worker environment.
acts = [None for _ in range(NUM_CORE)]
for env_act_id in range(NUM_CORE):
acts[env_act_id] = agent.act(obss[env_act_id], rews[env_act_id], dones[env_act_id])
# feed them to the multi_env
obss, rews, dones, infos = multi_envs.step(acts)
# as explained, this is a vector of Observation (as many as NUM_CORE in this example)
obss
array([<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f737a238f98>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f737a238f60>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f737a238ef0>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f737a246630>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f737a238f28>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f737a246048>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f737a24dc18>,
<grid2op.Observation.CompleteObservation.CompleteObservation object at 0x7f737a24de48>],
dtype=object)
The multi environment loop is really close to the "gym" loop:
# performs the appropriated steps
for i in range(10):
acts = [None for _ in range(NUM_CORE)]
for env_act_id in range(NUM_CORE):
acts[env_act_id] = agent.act(obss[env_act_id], rews[env_act_id], dones[env_act_id])
obss, rews, dones, infos = multi_envs.step(acts)
# DO SOMETHING WITH THE AGENT IF YOU WANT
## agent.train(obss, rews, dones)
# close the environments created by the multi_env
multi_envs.close()
On the above example, TRAINING_STEP steps are performed on NUM_CORE environments in parrallel. The agent has then acted TRAINING_STEP * NUM_CORE (=10 * 4 = 40 by default) times on NUM_CORE different environments.
III.b) Practical example¶
We reuse the code of the Notebook 3_TrainingAnAgent to train a new agent, but this time using more than one process of the machine. To further emphasize the working of multi environments, we put on a different module (ml_agent) the code of some agents and focus here on the training part.
Note that compare to the previous notebook, the code have been adapted to used "batch" of data when predicting movments. The input data is also restricted to:
- the relative flow value
- the powerline status
- the topology vector
All the other component of the observations are not used.
from ml_agent import TrainingParam, ReplayBuffer, DeepQAgent
from grid2op.Agent import AgentWithConverter
from grid2op.Reward import RedispReward
from grid2op.Converter import IdToAct
import numpy as np
import random
import warnings
import pdb
with warnings.catch_warnings():
warnings.filterwarnings("ignore", category=FutureWarning)
import tensorflow.keras
import tensorflow.keras.backend as K
from tensorflow.keras.models import load_model, Sequential, Model
from tensorflow.keras.optimizers import Adam
from tensorflow.keras.layers import Activation, Dropout, Flatten, Dense, subtract, add
from tensorflow.keras.layers import Input, Lambda, Concatenate
class TrainAgentMultiEnv(object):
def __init__(self, agent, nb_process, reward_fun=RedispReward, env=None, name=None):
# compare to the version showed in the notebook 3, the process buffer has been moved in this class
# and we add a multi_envs argument.
self.nb_process = nb_process
self.multi_envs = None
self.process_buffer = [[] for _ in range(self.nb_process)]
self.name = name
self.agent = agent
self.env = env
self.training_param = None
def close(self):
self.multi_envs.close()
def convert_process_buffer(self):
"""Converts the list of NUM_FRAMES images in the process buffer
into one training sample"""
# here i simply concatenate the action in case of multiple action in the "buffer"
if self.training_param.NUM_FRAMES != 1:
raise RuntimeError("This has not been tested with self.training_param.NUM_FRAMES != 1 for now")
return np.array([np.concatenate(el) for el in self.process_buffer])
def _build_valid_env(self, training_param):
# this function has also be adapted
create_new = False
if self.multi_envs is None:
create_new = True
# first we need to initialize the multi environment
self.multi_envs = MultiEnvironment(env=env, nb_env=self.nb_process)
# then, as before, we reset it
obss = self.multi_envs.reset()
for worker_id in range(self.nb_process):
self.process_buffer[worker_id].append(self.agent.convert_obs(obss[worker_id]))
# used in case of "num frames" != 1 (so not tested)
do_nothing = [self.env.action_space() for _ in range(self.nb_process)]
for _ in range(training_param.NUM_FRAMES-1):
# Initialize buffer with the first frames
s1, r1, _, _ = self.multi_envs.step(do_nothing)
for worker_id in range(self.nb_process):
# difference compared to previous implementation: we loop through all the observations
# and save them all
self.process_buffer[worker_id].append(self.agent.convert_obs(s1[worker_id]))
return create_new
def train(self, num_frames, training_param=TrainingParam()):
self.training_param = training_param
# first we create an environment or make sure the given environment is valid
close_env = self._build_valid_env(training_param)
# same as in the original implemenation, except the process buffer is now in this class
observation_num = 0
curr_state = self.convert_process_buffer()
# we initialize the NN exactly as before
self.agent.init_deep_q(curr_state)
# some parameters have been move to a class named "training_param" for convenience
epsilon = training_param.INITIAL_EPSILON
# now the number of alive frames and total reward depends on the "underlying environment". It is vector instead
# of scalar
alive_frame = np.zeros(self.nb_process, dtype=np.int)
total_reward = np.zeros(self.nb_process, dtype=np.float)
with tqdm(total=num_frames) as pbar:
while observation_num < num_frames:
if observation_num % 1000 == 999:
print(("Executing loop %d" %observation_num))
# for efficient reading of data: at early stage of training, it is advised to load
# data by chunk: the model will do game over pretty easily (no need to load all the dataset)
tmp = min(10000 * (num_frames // observation_num), 10000)
self.multi_envs.set_chunk_size(int(max(100, tmp)))
# Slowly decay the learning rate
if epsilon > training_param.FINAL_EPSILON:
epsilon -= (training_param.INITIAL_EPSILON-training_param.FINAL_EPSILON)/training_param.EPSILON_DECAY
initial_state = self.convert_process_buffer()
self.process_buffer = [[] for _ in range(self.nb_process)]
# TODO vectorize that in the Agent directly
# then we need to predict the next moves. Agents have been adapted to predict a batch of data
pm_i, pq_v = self.agent.deep_q.predict_movement(curr_state, epsilon)
# and build the convenient vectors (it was scalars before)
predict_movement_int = []
predict_q_value = []
acts = []
for p_id in range(self.nb_process):
predict_movement_int.append(pm_i[p_id])
predict_q_value.append(pq_v[p_id])
# and then we convert it to a valid action
acts.append(self.agent.convert_act(pm_i[p_id]))
# same loop as in notebook 3
reward, done = np.zeros(self.nb_process), np.full(self.nb_process, fill_value=False, dtype=np.bool)
for i in range(training_param.NUM_FRAMES):
temp_observation_obj, temp_reward, temp_done, _ = self.multi_envs.step(acts)
# we need to handle vectors for "done"
reward[~temp_done] += temp_reward[~temp_done]
# and then "de stack" the observations coming from different environments
for worker_id, obs in enumerate(temp_observation_obj):
self.process_buffer[worker_id].append(self.agent.convert_obs(temp_observation_obj[worker_id]))
done = done | temp_done
# increase of 1 the number of frame alive for relevant "underlying environments"
alive_frame[~temp_done] += 1
# loop through the environment where a game over was done, and print the results
for env_done_idx in np.where(temp_done)[0]:
print("For env with id {}".format(env_done_idx))
print("\tLived with maximum time ", alive_frame[env_done_idx])
print("\tEarned a total of reward equal to ", total_reward[env_done_idx])
reward[temp_done] = 0.
total_reward[temp_done] = 0.
total_reward += reward
alive_frame[temp_done] = 0
# vectorized version of the previous code
new_state = self.convert_process_buffer()
# same as before, but looping through the "underlying environment"
for sub_env_id in range(self.nb_process):
self.agent.replay_buffer.add(initial_state[sub_env_id],
predict_movement_int[sub_env_id],
reward[sub_env_id],
done[sub_env_id],
new_state[sub_env_id])
if self.agent.replay_buffer.size() > training_param.MIN_OBSERVATION:
s_batch, a_batch, r_batch, d_batch, s2_batch = self.agent.replay_buffer.sample(training_param.MINIBATCH_SIZE)
isfinite = self.agent.deep_q.train(s_batch, a_batch, r_batch, d_batch, s2_batch, observation_num)
self.agent.deep_q.target_train()
if not isfinite:
# if the loss is not finite i stop the learning
print("ERROR INFINITE LOSS")
break
# Save the network every 10000 iterations
if observation_num % 10000 == 9999 or observation_num == num_frames-1:
print("Saving Network")
if self.name is None:
self.agent.deep_q.save_network("saved_notebook6.h5")
else:
self.agent.deep_q.save_network("saved_notebook6_{}".format(self.name))
observation_num += 1
pbar.update(1)
if close_env:
print("closing env")
self.env.close()
We redifine the class used to train the agent.
agent_name = "sac_1e5"
my_agent = DeepQAgent(env.action_space, mode="SAC", training_param=TrainingParam())
trainer = TrainAgentMultiEnv(agent=my_agent, env=env, nb_process=NUM_CORE, name=agent_name)
# trainer = TrainAgent(agent=my_agent, env=env)
trainer.train(TRAINING_STEP)
trainer.close()
WARNING:tensorflow:From /home/donnotben/.local/lib/python3.6/site-packages/tensorflow/python/ops/resource_variable_ops.py:435: colocate_with (from tensorflow.python.framework.ops) is deprecated and will be removed in a future version. Instructions for updating: Colocations handled automatically by placer. WARNING:tensorflow:From /home/donnotben/.local/lib/python3.6/site-packages/tensorflow/python/keras/utils/losses_utils.py:170: to_float (from tensorflow.python.ops.math_ops) is deprecated and will be removed in a future version. Instructions for updating: Use tf.cast instead. Successfully constructed networks.
HBox(children=(FloatProgress(value=0.0), HTML(value='')))
For env with id 3 Lived with maximum time 2 Earned a total of reward equal to -10.0 For env with id 5 Lived with maximum time 4 Earned a total of reward equal to 1077.0223816944304 WARNING:tensorflow:From /home/donnotben/.local/lib/python3.6/site-packages/tensorflow/python/ops/math_ops.py:3066: to_int32 (from tensorflow.python.ops.math_ops) is deprecated and will be removed in a future version. Instructions for updating: Use tf.cast instead. For env with id 3 Lived with maximum time 6 Earned a total of reward equal to 1075.735591002436 For env with id 4 Lived with maximum time 10 Earned a total of reward equal to 1091.7395887955377 For env with id 0 Lived with maximum time 13 Earned a total of reward equal to 1057.4761663196673 For env with id 3 Lived with maximum time 12 Earned a total of reward equal to 2212.497969527082 For env with id 5 Lived with maximum time 17 Earned a total of reward equal to 3285.7270225485163 For env with id 7 Lived with maximum time 28 Earned a total of reward equal to 1035.7451876395112 For env with id 6 Lived with maximum time 29 Earned a total of reward equal to 1028.188758184281 For env with id 5 Lived with maximum time 12 Earned a total of reward equal to 2237.343192563007 For env with id 1 Lived with maximum time 53 Earned a total of reward equal to 1028.9711122236943 For env with id 5 Lived with maximum time 25 Earned a total of reward equal to 2210.648185863736 For env with id 3 Lived with maximum time 40 Earned a total of reward equal to 4415.636092477037 For env with id 0 Lived with maximum time 52 Earned a total of reward equal to 4545.679913625342 For env with id 7 Lived with maximum time 41 Earned a total of reward equal to 3277.2740693289884 For env with id 2 Lived with maximum time 71 Earned a total of reward equal to 4512.580363829556 For env with id 0 Lived with maximum time 7 Earned a total of reward equal to 1082.5597351265721 For env with id 3 Lived with maximum time 24 Earned a total of reward equal to 3349.3043333236146 For env with id 7 Lived with maximum time 17 Earned a total of reward equal to 1086.1556494129995 For env with id 5 Lived with maximum time 32 Earned a total of reward equal to 2136.6764374229965 For env with id 3 Lived with maximum time 9 Earned a total of reward equal to 2226.9701958954647 Saving Network Successfully saved network. closing env
import matplotlib.pyplot as plt
%matplotlib inline
plt.figure(figsize=(30,20))
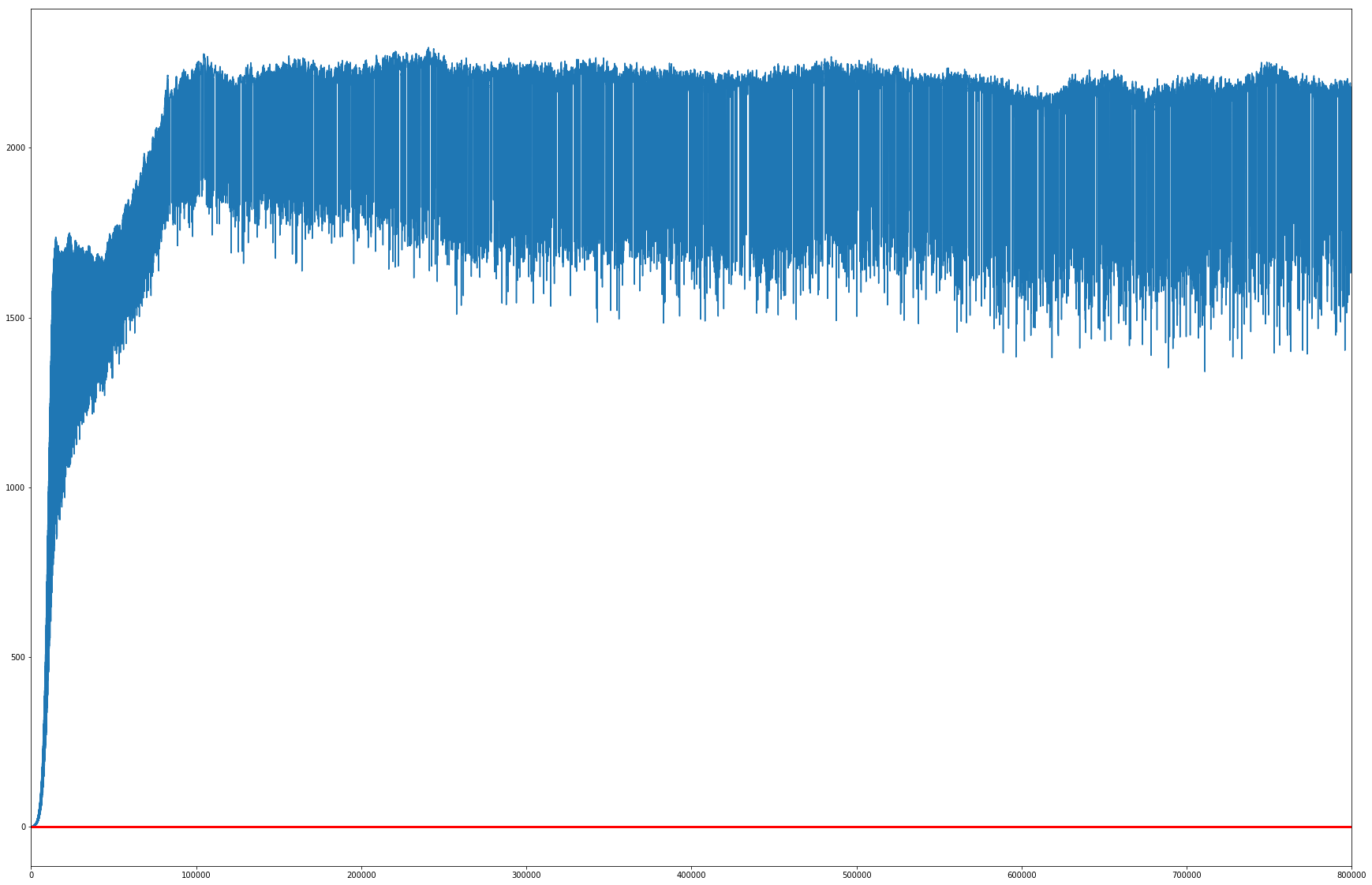
plt.plot(my_agent.deep_q.qvalue_evolution)
plt.axhline(y=0, linewidth=3, color='red')
_ = plt.xlim(0, len(my_agent.deep_q.qvalue_evolution))

A loss trained for 100000 iterations on 8 cores, for a ddqn agent and default parameters can look like:
II c) Assess the performance of the trained agent¶
First we evaluate the performance of a baseline, in this case the "do nothing" agent.
NB The use of a Runner (see the first notebook) is particurlaly suited for that purpose. We are showing here how to quickly assess the performances.
NB_EPISODE = 2
max_iter = 100
# tun the do nothing for the whole episode
dn_agent = grid2op.Agent.DoNothingAgent(env.action_space)
runner = Runner(**env.get_params_for_runner(), agentInstance=dn_agent, agentClass=None)
res = runner.run(nb_episode=NB_EPISODE, max_iter=max_iter, pbar=tqdm)
print("The results for the DoNothing agent are:")
for _, chron_id, cum_reward, nb_time_step, max_ts in res:
msg_tmp = "\tFor chronics with id {}\n".format(chron_id)
msg_tmp += "\t\t - cumulative reward: {:.6f}\n".format(cum_reward)
msg_tmp += "\t\t - number of time steps completed: {:.0f} / {:.0f}".format(nb_time_step, max_ts)
print(msg_tmp)
HBox(children=(FloatProgress(value=0.0, description='episode', max=2.0, style=ProgressStyle(description_width=…
HBox(children=(FloatProgress(value=1.0, bar_style='info', description='episode', max=1.0, style=ProgressStyle(…
HBox(children=(FloatProgress(value=1.0, bar_style='info', description='episode', max=1.0, style=ProgressStyle(…
The results for the DoNothing agent are: For chronics with id 000 - cumulative reward: 122885.137597 - number of time steps completed: 100 / 100 For chronics with id 001 - cumulative reward: 122958.161930 - number of time steps completed: 100 / 100
Then we load the saved neural network, and we can now evaluate the fixed policy:
obs = env.reset()
trained_agent = DeepQAgent(env.action_space, mode="DDQN", training_param=TrainingParam())
trained_agent.init_deep_q(trained_agent.convert_obs(obs))
trained_agent.load_network("saved_notebook6_{}".format(agent_name))
runner = Runner(**env.get_params_for_runner(), agentInstance=trained_agent, agentClass=None)
res = runner.run(nb_episode=NB_EPISODE, max_iter=max_iter, pbar=tqdm)
print("The results for the DoNothing agent are:")
for _, chron_id, cum_reward, nb_time_step, max_ts in res:
msg_tmp = "\tFor chronics with id {}\n".format(chron_id)
msg_tmp += "\t\t - cumulative reward: {:.6f}\n".format(cum_reward)
msg_tmp += "\t\t - number of time steps completed: {:.0f} / {:.0f}".format(nb_time_step, max_ts)
print(msg_tmp)
Successfully constructed networks. Succesfully loaded network.
HBox(children=(FloatProgress(value=0.0, description='episode', max=2.0, style=ProgressStyle(description_width=…
HBox(children=(FloatProgress(value=1.0, bar_style='info', description='episode', max=1.0, style=ProgressStyle(…
HBox(children=(FloatProgress(value=1.0, bar_style='info', description='episode', max=1.0, style=ProgressStyle(…
The results for the DoNothing agent are: For chronics with id 000 - cumulative reward: 122885.137597 - number of time steps completed: 100 / 100 For chronics with id 001 - cumulative reward: 122958.161930 - number of time steps completed: 100 / 100
A default DDQN agent trained on 8 cores on 1000000 steps (so 8e6 steps in total), 24h of training on a laptop achieved to perform 5637 steps, largely outperforming the "do nothing" agent (which did only 2180 steps on the same 2 environment).