
Focus of this talk¶
- Not Math
- Not Programming
- Problem Solving
- Under-utilized methods
- Showcase Ipython Notebooks
Background – What we do as a company¶
- Programmatic Advertising
- Custom ad campaigns for agencies and large companies
- Targeting Platform
- Hyper local geo targeting
- Cookie and cookieless user targeting
- Contextual and Performance based media targeting

Background – What does our system do¶
- Real Time Bidding with 12B-15B ad requests
- We want to serve several hundred million ads
- Data intelligence paltform
- Offline and online models to create scored lists
- Users
- Media
- Geography
- Time
- Auction theory
- Score every ad request
- Bidders execute on scores in under 50ms roundtrip
Background – What we do as data scientists¶
- Focus
- Machine learning
- Automation
- Scale
- Process
- Prototype examples
- Implement in production if possible
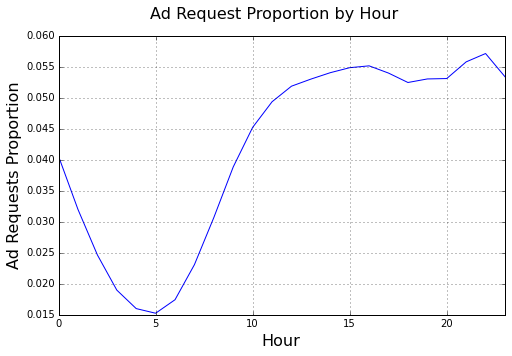
Background – The pacing problem¶
For each campaign we have a target for the number of ads to serve every minute. We would like to serve the best quality ads at every opportunity.
Why?¶
- Best time to influence people
- Always serve the best ads possible
- Smooth serving accross the day (hedging)
- To beat competition
Problem 1: How do I control the speed of ad serving?¶
PID Control¶
A proportional-integral-derivative controller is a control loop feedback mechanism.
- $SP$ : Set point (target you would like your process to hit)
- $PV$ : Process value (where your process currently is)
- $e$ : Error ($SP - PV$)
- $K_p$ : Proportional gain, a tuning parameter
- $K_i$ : Integral gain, a tuning parameter
- $K_d$ : Derivative gain, a tuning parameter
- $t$ : Time or instantaneous time (the present)
- $\tau$ : Variable of integration; takes on values from time 0 to the present
- $u(t)$ : PID Controller output at time $t$
PID Tuning¶
- PID loops are very sensitive to tuning the parameters
- Tuning parameters are also specific to each implementation
- Tuning is made easier through dimension reduction of parameter space via Ziegler-Nichols transformation
| $K_p$ | $K_i$ | $K_d$ | |
|---|---|---|---|
| PID | $0.6K_u$ | $2K_p/P_u$ | $K_pP_u/8$ |
import pandas as pd
from pandas import Series
import matplotlib.pyplot as plt
import numpy.random as rand
import numpy as np
%matplotlib inline
pd.set_option('display.width',200)
import time
from bokeh.plotting import *
from bokeh.objects import Glyph
from bokeh.objects import Range1d
output_notebook(url="default")
Using saved session configuration for http://localhost:5006/ To override, pass 'load_from_config=False' to Session
class PID:
def __init__(self):
self.Kp = 0
self.Kd = 0
self.Ki = 0
self.Ku = 0
self.Pu = 0
self.previous_error = 0
self.cumulative_error = 0
def update_params(self):
self.Kp = 0.6*self.Ku
self.Ki = 2*0.2*self.Ku/self.Pu
self.Kd = 0.6*self.Ku*self.Pu/8
def set_zn_params(self,Ku, Pu):
''' Ziegler-Nichols Parameters '''
self.Pu = Pu
self.Ku = Ku
self.update_params()
def set_pid_params(self,Kp, Ki, Kd):
self.Kp = Kp
self.Kd = Ki
self.Ki = Kd
def step(self, error, time_delta):
error_delta = error - self.previous_error
self.p_contribution = self.Kp * error
self.cumulative_error += error * time_delta
self.i_contribution = self.Ki * self.cumulative_error
self.d_contribution = 0
if time_delta > 0:
self.d_contribution = self.Kd * error_delta/time_delta
self.previous_error = error
return self.p_contribution + self.i_contribution + self.d_contribution
def pid_plot(res):
fig = plt.figure()
ax = res.process_value.plot(figsize=(12,6), label = 'Process Value' )
res.set_point.plot(secondary_y=False, style='y', label = 'Setpoint Target' )
ax2 = res.controller_output.plot(secondary_y=True, style='r', label = 'Controller Output' )
ax.set_xlabel('Iteration', fontsize=16)
ax.set_ylabel('Target Values', fontsize=16)
ax2.set_ylabel('Controller Output', fontsize=16)
handles, labels = ax.get_legend_handles_labels()
handles2, labels2 = ax2.get_legend_handles_labels()
handles.extend(handles2)
labels.extend(labels2)
ax.legend(handles, labels)
plt.show()
def pid_stream_plot1(res):
N = len(res.iteration)
figure(tools="",
title = 'PID Process',
x_axis_label = 'Iteration',
y_axis_label = 'Process Value',
y_range=Range1d(start=0, end=15))
hold()
line(res.iteration,res.set_point, color="#DF7401", plot_width=800, plot_height=500, legend='Set Point')
line(res.iteration[:1],res.process_value[:1], color="#013ADF", plot_width=800, plot_height=500, legend='Process Value')
line(res.iteration[:1],res.controller_output[:1], color="#FF0000", plot_width=800, plot_height=500, legend='Controller Output')
grid().grid_line_alpha=0.3
renderer1 = [r for r in curplot().renderers if isinstance(r, Glyph)][1]
ds1 = renderer1.data_source
renderer2 = [r for r in curplot().renderers if isinstance(r, Glyph)][2]
ds2 = renderer2.data_source
#xaxis().axis_label='Iteration'
#yaxis().axis_label='Values'
show()
for i in range(N):
ds1.data["x"] = res.iteration[:i]
ds1.data["y"] = res.process_value[:i]
ds2.data["x"] = res.iteration[:i]
ds2.data["y"] = res.controller_output[:i]
ds1._dirty = True
ds2._dirty = True
cursession().store_objects(ds1)
cursession().store_objects(ds2)
time.sleep(0.01)
def run_pid(Ku = 0.2, Pu = 5):
pid = PID()
pid.set_zn_params(Ku, Pu)
res = pd.DataFrame(columns=('iteration', 'set_point', 'process_value',
'controller_output', 'controller_change', 'error'))
iteration = 0
set_point = 5
process_value = 0
controller_output = 1
controller_change = 0
error = 0
time_delta = 1
row = pd.DataFrame([dict(iteration = iteration,
set_point = set_point,
process_value = process_value,
controller_output = controller_output,
controller_change = controller_change,
error = error)])
res = res.append(row, ignore_index=True)
for i in range(1, 250):
process_value = 1.7*(controller_output + 1)
error = set_point - process_value
controller_change = pid.step(error,time_delta)
controller_output += controller_change
controller_output = min(max(controller_output,1),30)
#arbitrary set_point changes
if (i==50):
set_point = 8
if (i==100):
set_point = 12
if (i==150):
set_point = 4
row = pd.DataFrame([dict(iteration = i,
set_point = set_point,
process_value = process_value,
error = error,
controller_output = controller_output,
controller_change = controller_change)])
res = res.append(row, ignore_index=True)
return res
PID Toy Example¶
res = run_pid(Ku = 0.2, Pu = 5)
pid_plot(res)
#pid_stream_plot1(res)

Some Lessons¶
- So this kind of works!
- Tuning is important
- Build in safeguards
Problem 2: But my process value is not nearly that smooth¶
We need some kind of time series smoothing.
Anything ARIMA or moving average based is a really bad idea:
- It's slow changing
- Has a built in lag
- Entirely backwards looking
- Offline Algorithm
What we really need is a Dynamic Linear Model$^1$
- Forward looking
- Online Algorithm
- Certainty estimates about current state
- Bayesian
$ $
$^1$ We run about 3B DLMs a day, pacing is only 4-5M of those
Kalman Filter¶
Kalman filter is a very basic DLM$^2$
The general problem is to estimate the state $x \in \mathbb{R}^n$ of a discrete-time controlled process that is governed by the linear stochastic difference equation:
$$ x_k = Ax_{k-1} + Bu_{k-1} + w_{k} $$with measurement $z \in \mathbb{R}^m$ that is
$$ z_k = Hx_k + v_k $$where $w_k$ and $v_k$ are the process and measurement noise with
$$ p(w) \backsim N(0,Q) $$$$ p(v) \backsim N(0,R) $$$A$ is $n \times n$ is the difference equation relating state $k$ to state $k-1$.
$B$ relates to the optional control input $u \in \mathbb{R}^l$ to state $x$.
$H$ is an $m \times n$ matrix in the measurement equation relating to the observed measurements $z_k$.
$ $
$^2$ (2006) Welch and Bishop - 'An Introduction to the Kalman Filter'
Kalman Filter continued¶
We can define $\hat{x}^-_k \in \mathbb{R}^n$ as a priori estimate a step $k$ given all our knowledge up to step $k$, and $\hat{x}_k \in \mathbb{R}^n$ is the a posteriori state estimate at step $k$ given measurement $z_k$.
Thus a priori and a posteriori errors are:
$$e^-_k \equiv x_k - \hat{x}^-_k $$$$e_k \equiv x_k - \hat{x}_k $$With covariances:
$$ P^-_k = E[e^-_ke^{-T}_k] \\ P_k = E[e_ke^{T}_k]$$We eventually end up with something called blending factor
$$K_k = P^-_kH^t(HP^-_kH^T+R)^{-1} $$So as the measurement error covariance $R$ approaches $0$, $K$ weights the process residual more heavily.
Conversely, as the a priori estimate error covariance $P^-_k$ approaches $0$, $K$ weights the process residual less heavily.
Kalman Filter Algorithm¶
Get initial estimates for $\hat{x}_k$ and $P_{k-1}$
Time update step (Predict)¶
Project the new state
$$\hat{x}^-_k = A \hat{x}_{k-1} + Bu_{k-1}$$Project the new error covariance
$$P^-_k=AP_{k-1}A^T+Q$$Measurement Update (Correct)¶
Compute blending factor
$$K_k = P^-_kH^T(HP^-_kH^T+R)^{-1}$$Update process estimate with new measurement
$$\hat{x}_k = \hat{x}^-_k + K_k(z_k-H\hat{x}^-_k)$$Update error covariance
$$P_k = (I-K_kH)P^-_k$$class KalmanFilter:
def __init__(self, x, A, B, P, Q, H, R):
self.x_aposteriori = x # Starting state
self.A = A # State transition matrix
self.B = B # Control matrix
self.covariance_aposteriori = P # Starting covariance
self.Q = Q # Process Error
self.H = H # Observation matrix
self.R = R # Measurement Error
def update(self, measurement, control = 0):
# Time update
x_apriori = self.A * self.x_aposteriori + self.B * control
covariance_apriori = self.A * self.covariance_aposteriori * self.A.T + self.Q
# Measurement Update
kalman_gain = covariance_apriori * self.H.T * np.linalg.inv((self.H * covariance_apriori * self.H.T + self.R))
self.x_aposteriori = x_apriori + kalman_gain * (measurement - self.H * x_apriori)
dimension = self.covariance_aposteriori.size
self.covariance_aposteriori = (np.eye(dimension) - kalman_gain * self.H) * covariance_apriori
def plot_kf(df):
fig = plt.figure()
ax = df.measurement.plot(figsize=(12,6), label = 'Measurement' )
df.smoothed_measurement.plot(secondary_y=False, style='g', label = 'Smoothed Measurement' )
ax.set_xlabel('Iteration', fontsize=16)
ax.set_ylabel('Measured Values', fontsize=16)
handles, labels = ax.get_legend_handles_labels()
ax.legend(handles, labels)
plt.show()
def kf_stream_plot1(df):
N = len(df.iteration)
figure(tools="",
title = 'Kalman Filter Toy Example',
x_axis_label = 'Iteration',
x_range=Range1d(start=0, end=N),
y_range=Range1d(start=0, end=df.measurement.max() + 1))
hold()
line(res.iteration[:1],df.measurement[:1], color="#013ADF", plot_width=800, plot_height=500, legend='Measurement Value')
line(res.iteration[:1],df.smoothed_measurement[:1], color="#088A08", plot_width=800, plot_height=500, legend='Smoothed Measurement')
grid().grid_line_alpha=0.3
renderer1 = [r for r in curplot().renderers if isinstance(r, Glyph)][0]
ds1 = renderer1.data_source
renderer2 = [r for r in curplot().renderers if isinstance(r, Glyph)][1]
ds2 = renderer2.data_source
xaxis().axis_label='Iteration'
yaxis().axis_label='Values'
show()
for i in range(N):
ds1.data["x"] = df.iteration[:i]
ds1.data["y"] = df.measurement[:i]
ds2.data["x"] = df.iteration[:i]
ds2.data["y"] = df.smoothed_measurement[:i]
ds1._dirty = True
ds2._dirty = True
cursession().store_objects(ds1)
cursession().store_objects(ds2)
time.sleep(0.01)
Kalman Filter Toy Example¶
Create some noisy series which has a clear underlying mean that will never clearly be measured.
Generate $z \backsim \sum\limits^n I(Uniform(0,10)>5)$.
x = np.matrix(1)
A = np.matrix(1)
B = np.matrix(0)
P = np.matrix(1)
Q = np.matrix(0.05)
H = np.matrix(1)
R = np.matrix(2)
kf = KalmanFilter(x, A, B, P, Q, H, R)
df = pd.DataFrame(columns=('iteration','measurement','smoothed_measurement'))
smoothed_measurement = 0
measurement = 0
row = pd.DataFrame([dict(iteration = 0,
measurement = measurement,
smoothed_measurement = smoothed_measurement)])
df = df.append(row, ignore_index=True)
trials = 20
for i in range(1,100):
measurement = 1*(np.random.uniform(0,10,trials)>5).sum()
kf.update(measurement)
smoothed_measurement = kf.x_aposteriori[(0,0)]
row = pd.DataFrame([dict(iteration = i,
measurement = measurement,
smoothed_measurement = smoothed_measurement)])
df = df.append(row, ignore_index=True)
if i == 50:
trials += 10
#plot_kf(df)
kf_stream_plot1(df)
Some more Lessons¶
- So this also kind of works!
- Tuning is also important
- We don't want a smooth filter
def pid_plot2(res):
fig = plt.figure()
ax = res.process_value.plot(figsize=(12,6), label = 'Process Value' )
res.set_point.plot(secondary_y=False, style='y', label = 'Setpoint Target' )
res.smoothed.plot(secondary_y=False, style='g', label = 'Smoothed Process Value' )
ax2 = res.controller_output.plot(secondary_y=True, style='r', label = 'Controller Output' )
ax.set_xlabel('Iteration', fontsize=16)
ax.set_ylabel('Target Values', fontsize=16)
ax2.set_ylabel('Controller Output', fontsize=16)
handles, labels = ax.get_legend_handles_labels()
handles2, labels2 = ax2.get_legend_handles_labels()
handles.extend(handles2)
labels.extend(labels2)
ax.legend(handles, labels)
plt.show()
def pid_stream_plot2(res):
N = len(res.iteration)
figure(tools="pan,wheel_zoom,box_zoom,reset,previewsave",
title = 'PID Process with noisy data',
y_range = Range1d(start=0, end=res.controller_output.max()+1),
x_axis_label = 'Iteration')
hold()
line(res.iteration,res.set_point, color="#DF7401", plot_width=800, plot_height=500, legend='Set Point')
line(res.iteration[:1],res.process_value[:1], color="#013ADF", plot_width=800, plot_height=500, legend='Process Value')
line(res.iteration[:1],res.controller_output[:1], color="#FF0000", plot_width=800, plot_height=500, legend='Controller Output')
line(res.iteration[:1],res.smoothed[:1], color="#088A08", plot_width=800, plot_height=500, legend='Smoothed Process Value')
grid().grid_line_alpha=0.3
renderer1 = [r for r in curplot().renderers if isinstance(r, Glyph)][1]
ds1 = renderer1.data_source
renderer2 = [r for r in curplot().renderers if isinstance(r, Glyph)][2]
ds2 = renderer2.data_source
renderer3 = [r for r in curplot().renderers if isinstance(r, Glyph)][3]
ds3 = renderer3.data_source
xaxis().axis_label='Iteration'
yaxis().axis_label='Values'
show()
for i in range(N):
ds1.data["x"] = res.iteration[:i]
ds1.data["y"] = res.process_value[:i]
ds2.data["x"] = res.iteration[:i]
ds2.data["y"] = res.controller_output[:i]
ds3.data["x"] = res.iteration[:i]
ds3.data["y"] = res.smoothed[:i]
ds1._dirty = True
ds2._dirty = True
ds3._dirty = True
cursession().store_objects(ds1)
cursession().store_objects(ds2)
cursession().store_objects(ds3)
time.sleep(0.01)
Putting it together¶
def init_system(Ku = 0.3,Pu = 25):
res = pd.DataFrame(columns=('iteration', 'set_point', 'process_value', 'smoothed',
'controller_output', 'controller_change', 'error'))
iteration = 0
set_point = 5
process_value = 0
controller_output = 1
controller_change = 0
error = 0
smoothed = 0
row = pd.DataFrame([dict(iteration = iteration,
set_point = set_point,
process_value = process_value,
smoothed = smoothed,
controller_output = controller_output,
controller_change = controller_change,
error = error)])
res = res.append(row, ignore_index=True)
#initialise PID
pid = PID()
pid.set_zn_params(Ku, Pu)
#initialise Kalman Filter
x = np.matrix(1)
A = np.matrix(1)
B = np.matrix(0)
P = np.matrix(1)
Q = np.matrix(0.5)
H = np.matrix(1)
R = np.matrix(10)
kf = KalmanFilter(x, A, B, P, Q, H, R)
return res, pid, kf
def exec_system(res, pid, kf):
controller_output = res.controller_output[0]
set_point = res.set_point[0]
time_delta = 1
for i in range(1, 250):
process_value = 1*(rand.uniform(0,10,controller_output)>5).sum()
kf.update(process_value)
smoothed = kf.x_aposteriori[(0,0)]
error = set_point - smoothed.item()
controller_change = pid.step(error,time_delta)
controller_output += controller_change
controller_output = min(max(controller_output,1),30)
#arbitrary set_point changes
if (i==50):
set_point = 8
if (i==100):
set_point = 12
if (i==150):
set_point = 4
row = pd.DataFrame([dict(iteration = i,
set_point = set_point,
process_value = process_value,
smoothed = smoothed,
error = error,
controller_output = controller_output,
controller_change = controller_change)])
res = res.append(row, ignore_index=True)
return res
res, pid, kf = init_system(Ku = 0.3,Pu = 5)
res = exec_system(res, pid, kf)
pid_plot2(res)
#pid_stream_plot2(res)

Even more Lessons¶
- So this still also kind of works!
- Tuning is also important but all ad campaigns are different
- Movements of the PID controller output is not smooth
Particle Swarm Optimization¶
- Create a population (called a swarm) of candidate solutions (called particles).
- These particles are moved around in the search-space according to a few simple formulae.
- The movements of the particles are guided by their own best known position in the search-space as well as the entire swarm's best known position.
- When improved positions are being discovered these will then come to guide the movements of the swarm.
Naïve Particle Swarm Optimization¶
- Pick a safe starting point (the system has to start somewhere)
- After each iteration spawn $k$ new particles around the previous used particle
- Validate retroactively which particle would have performed the best in the last iteration
- Update used particle to be the optimal back tested particle
def pid_neighbours(pid, w):
# create neighbouring PIDs
pidKminus = copy(pid)
pidKminus.set_params(max(pid.Ku*(1-w),ku_floor), pid.Pu)
pidKplus = copy(pid)
pidKplus.set_params(min(pid.Ku*(1+w),ku_ceiling), pid.Pu)
pidPminus = copy(pid)
pidPminus.set_params(pid.Ku, max(pid.Pu*(1-w), pu_floor))
pidPplus = copy(pid)
pidPplus.set_params(pid.Ku, min(pid.Pu*(1+w), pu_ceiling))
return pidKminus, pidKplus, pidPminus, pidPplus
df3 = pd.read_csv('test_dat.csv')
pacing_all = pd.DataFrame(columns=('thour','tmin','imps'))
for i in range(7,23):
for j in range(2,58):
impressions = df3[(df3.thour==i) & (df3.tminute==j)]['dirretargetingflag'].notnull().sum()
row = pd.DataFrame([dict(thour = i,tmin = j,imps = impressions), ])
pacing_all = pacing_all.append(row, ignore_index=True)
def score_plot(df3):
plt.figure()
ax = df3['final_score'].hist(bins=100, range = (0,10),figsize=(12,6))
ax.set_xlabel('Score', fontsize=16)
ax.set_ylabel('Available ads', fontsize=16)
handles, labels = ax.get_legend_handles_labels()
def ts_plot(pacing_all):
plt.figure()
ax = pacing_all.imps.plot(figsize=(12,6), label = 'Ads Available')
ax.set_xlabel('Minute', fontsize=16)
ax.set_ylabel('Available ads', fontsize=16)
handles, labels = ax.get_legend_handles_labels()
So let's try some real data¶
Skew and variable score distributions¶
score_plot(df3)

Highly volatile stream of ad requests¶
ts_plot(pacing_all)

Finally a realistic simulation¶
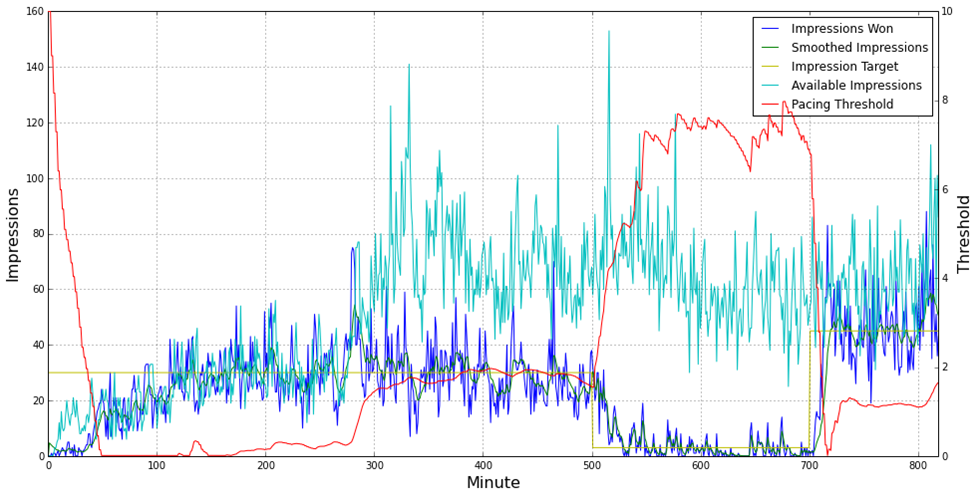
With self-tuning PID paramaters¶

Business Should Shape the Algorithm and its Learning¶
- Self-tuning systems can work well
- System specific safeguards are needed
- Slow servers causing data delays
- Raising and lowering threshold values are not symmetric business decisions
- Start carefully
- Check for bad behaviour
- Monitor systems
Our production system¶
