https://github.com/daddygongon/jupyter_num_calc/tree/master/notebooks_python
cc by Shigeto R. Nishitani 2017-19
pythonによる最小2乗法¶
前章では,データに多項式を完全にフィットする補間についてみた.今回は,近似的にフィットする最小二乗法について詳しくみていく.図のようなデータに直線をフィットする場合を考えよう.
python code¶
x = [1,2,3,4], y=[0,5,15,24]に$y=a0+a1\,x$をフィットする例を考える. pythonのcodeは以下の通り.
%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import curve_fit
def f(x, a0, a1): #, a2):
return a0 + a1*x #+ a2*x**2
xdata = np.array([1,2,3,4])
ydata = np.array([0,5,15,24])
plt.plot(xdata,ydata, 'o', color='r')
params, cov = curve_fit(f, xdata, ydata)
print(params)
x =np.linspace(0,4,20)
y = f(x,params[0],params[1]) #,params[2])
plt.plot(x,y, color='b')
plt.grid()
plt.show()
[-9.5 8.2]

結果,a0=-9.5, a1=8.2にfitされることがわかる.
最小2乗法の原理¶
もっとも簡単な例で原理を解説する.近似関数として,
$$ F(x) = a_0+a_1\,x $$という直線近似を考える.もっともらしい関数は$N$点の測定データとの差$d_i = F(x_i)-y_i$を最小にすればよさそうであるが,これはプラスマイナスですぐに消えて不定になる.そこで,
$$ \chi^{2}=\sum_i^N d_i^2=\sum_i^N\left(a_0+a_1\,x_i-y_i\right)^2 $$という関数を考える.この$\chi^2$(カイ二乗)関数が,$a_0, a_1$をパラメータとして変えた時に最小となる$a_0, a_1$を求める.これは,それらの微分がそれぞれ0となる場合である.これは$\chi^2$の和$\sum$(sum)の中身を展開し,
$\chi^2=$
$a_0, a_1$でそれぞれ微分すれば
$ \frac{\partial}{\partial a_0} \chi^2=$
$ \frac{\partial}{\partial a_1} \chi^2=$
という$a_0, a_1$を未知変数とする2元の連立方程式が得られる.これは前に説明した通り逆行列で解くことができる.
$\chi^2$の極小値から(2変数の例)¶
先ほどの例をもとに何をしているか別の角度からみる. データを関数に入れてsumをとると次のような関数が得られる.
%matplotlib notebook
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
import numpy as np
from sympy import *
a0, a1 = symbols('a0, a1')
def func(x):
return a0+a1*x
def z_surf(xx,yy):
sum = 0
for i in range(0,4):
tmp = xx[i] - yy[i]
sum = sum + tmp*tmp
return sum
x1 = np.array([1,2,3,4])
y1 = np.array([0,5,15,24])
eq = z_surf(func(x1),y1)
print(eq)
print(expand(eq))
(a0 + a1)**2 + (a0 + 2*a1 - 5.0)**2 + (a0 + 3*a1 - 15.0)**2 + (a0 + 4*a1 - 24.0)**2 4*a0**2 + 20*a0*a1 - 88.0*a0 + 30*a1**2 - 302.0*a1 + 826.0
これはa0,a1を変数とする関数となっている. データ点(xi,yi)はすでに数値を持っており,未知なのはa0,a1である. そうすると$\chi^2(a0,a1)$, つまりa0,a1をパラメータとして,$\chi^2$の値をz軸とする3次元関数とみなすことができて,それをplotすると次の通り.
%matplotlib notebook
def f(a0, a1):
return 4*a0**2 + 20*a0*a1 - 88.0*a0 + 30*a1**2 - 302.0*a1 + 826.0
a0 = np.arange(-20, 20, 5)
a1 = np.arange(-20, 20, 5)
A0, A1 = np.meshgrid(a0, a1)
Z1 = f(A0, A1)
fig = plt.figure()
plot3d = Axes3D(fig)
plot3d.plot_surface(A0, A1, Z1)
plt.show()

a0=-9.5, a1=8.2あたりに最小値があるはずですが...見にくいよね. こういうのをsteepな関数って言いますが,それが後で述べる特異値分解を使わなければいけない理由です. 値が微妙でなければ,微分して0において,連立方程式とみなして解くことができます. それが,上の「最小2乗法の原理」で述べた解法になります.
正規方程式(Normal Equations)による解¶
より一般的な場合の最小二乗法の解法を説明する.先程の例では1次の多項式を近似関数とした.これをより一般的な関数,例えば,$\sin, \cos, \tan, \exp, \sinh$などとする.これを線形(linear)につないだ関数を
$$ F \left(x \right)=a _{0}\sin \left(x \right)+a _{1}\cos \left(x \right)+a _{2}\exp \left(-x \right)+a _{3}\sinh \left(x \right)+\cdots ={\sum_{k=1}^{M}}a _{k }X _{k }\left(x \right) $$ととる.実際には,$X_k(x)$はモデルや,多項式の高次項など論拠のある関数列をとる.これらを基底関数(base functions)と呼ぶ.ここで線形といっているのは,パラメータ$a_k$について線形という意味である.このような,より一般的な基底関数を使っても,$\chi^2$関数は
$$ {\chi}^{2}=\sum _{i=1}^{N} \left( F \left( x_{{i}} \right) -y_{{i}} \right) ^{2} =\sum _{i=1}^{N} \left( \sum _{k=1}^{M}a_{{k}}X_{{k}} \left( x_{{i}} \right) -y_{{i}} \right) ^{2} $$と求めることができる. この関数を,$a_k$を変数とする関数とみなす. この関数が最小値を取るのは, $\chi^2$を$M$個の$a_k$で偏微分した式がすべて0となる場合である. これを実際に求めてみると,
$$ \sum _{i=1}^{N} \left( \sum _{j=1}^{M}a_{{j}}X_{{j}} \left( x_{{i}} \right) -y_{{i}} \right) X_{{k}} \left( x_{{i}} \right) =0 $$となる.ここで,$k = 1..M$の$M$個の連立方程式である.この連立方程式を最小二乗法の正規方程式(normal equations)と呼ぶ.
上記の記法のままでは,ややこしいので,行列形式で書き直す.$N \times M$で,各要素を
$$ A_{ij} = X_j(x_i) $$とする行列$A$を導入する.この行列は,
$$ A=\left[ \begin{array}{cccc} X_1(x_1) & X_2(x_1) & \cdots & X_M(x_1) \\ \vdots & \vdots & \cdots & \vdots \\ \vdots & \vdots & \cdots & \vdots \\ \vdots & \vdots & \cdots & \vdots \\ X_1(x_N) & X_2(x_N) & \cdots & X_M(x_N) \end{array} \right] $$となる.これをデザイン行列と呼ぶ.すると先程の正規方程式は,
$$ A^t . A . a = A^t . y $$で与えられる.$A^t$は行列$A$の転置(transpose)
$$ A^t = A_{ij}^t = A_{ji} $$を意味し,得られた行列は,$M \times N$である.$a, y$はそれぞれ,
$$ a=\left[ \begin{array}{c} a_1\\a_2\\\vdots\\a_M \end{array} \right],\, y=\left[ \begin{array}{c} y_1\\y_2\\\vdots\\y_N \end{array} \right] $$である.
$M = 3, N = 25$として行列の次元だけで表現すると,
$$ \left[ \begin{array}{ccccc} & & \cdots & &\\ \cdots & \cdots & \cdots & \cdots & \cdots \\ & & \cdots & &\\ \end{array} \right] \left[ \begin{array}{ccc} & \vdots &\\ & \vdots &\\ \cdots & \cdots & \cdots\\ & \vdots &\\ & \vdots &\\ \end{array} \right] \left[ \begin{array}{c} \vdots\\ \vdots\\ \vdots \end{array} \right] = \left[ \begin{array}{ccccc} & & \cdots & &\\ \cdots & \cdots & \cdots & \cdots & \cdots \\ & & \cdots & &\\ \end{array} \right] \left[ \begin{array}{c} \vdots\\ \vdots\\ \vdots\\ \vdots\\ \vdots \end{array} \right] $$となる.これは少しの計算で$3 \times 3$の逆行列を解く問題に変形できる.
python codeによる具体例¶
4点のデータに対して,2次関数つまり3個のパラメータでfitする. その場合,デザイン行列は4行3列になる.
import numpy as np
from pprint import pprint
import scipy.linalg as linalg
xdata=np.array([1,2,3,4])
ydata=np.array([0,5,15,24])
def ff(x,i):
return x**i
Av = np.zeros([4,3])
for i in range(0,3):
for j in range(0,4):
Av[j][i]=ff(xdata[j],i)
pprint(Av)
Ai = linalg.inv(np.dot(np.transpose(Av),Av))
b = np.dot(np.transpose(Av),ydata)
np.dot(Ai,b)
array([[ 1., 1., 1.],
[ 1., 2., 4.],
[ 1., 3., 9.],
[ 1., 4., 16.]])
array([-4.5, 3.2, 1. ])
特異値分解(Singular Value Decomposition)による解¶
正規方程式を解くときには,少し注意が必要である.単純な逆行列による解法では,間違った答えに行き着く可能性が高い.より信頼性の高い方法では,特異値分解を用いる.正規方程式での共分散行列,特異値分解の導出や標準偏差との関係はNumRecipeを参照せよ.
import numpy as np
from pprint import pprint
import scipy.linalg as linalg
xdata=np.array([1,2,3,4])
ydata=np.array([0,5,15,24])
#def f(x,a1,a2,a3):
# return a1+a2*x+a3*x**2
def ff(x,i):
return x**i
Av = np.zeros([4,3])
for i in range(0,3):
for j in range(0,4):
Av[j][i]=ff(xdata[j],i)
m,n = Av.shape
pprint(Av)
U, s, Vs = linalg.svd(Av)
pprint(s)
S = linalg.diagsvd(s,m,n)
pprint(S)
iS = np.zeros([3,4])
for i in range(0,3):
iS[i][i] = 1.0/s[i]
print(iS)
left = np.dot(np.transpose(Vs),iS)
right= np.dot(np.transpose(U),ydata)
np.dot(left,right)
print(right)
array([[ 1., 1., 1.],
[ 1., 2., 4.],
[ 1., 3., 9.],
[ 1., 4., 16.]])
array([ 19.62136402, 1.71206987, 0.26625288])
array([[ 19.62136402, 0. , 0. ],
[ 0. , 1.71206987, 0. ],
[ 0. , 0. , 0.26625288],
[ 0. , 0. , 0. ]])
[[ 0.05096486 0. 0. 0. ]
[ 0. 0.58408831 0. 0. ]
[ 0. 0. 3.75582793 0. ]]
[-28.61521162 1.83564305 -1.41424125 1.34164079]
scipy.linalg.lstsq¶
scipy.linalg.lstsqによるcurve fitについて紹介しておく. あらかじめ,デザイン行列$A$を作っておいて,これを $$ A x = b $$ とみなした場合の$x$について解く.
import numpy as np
from pprint import pprint
import scipy.linalg as linalg
xdata=np.array([1,2,3,4])
ydata=np.array([0,5,15,24])
def ff(x,i):
return x**i
Av = np.zeros([4,3])
for i in range(0,3):
for j in range(0,4):
Av[j][i]=ff(xdata[j],i)
print(Av)
c, resid, rank, sigma = linalg.lstsq(Av, ydata)
print(c,resid,rank,sigma)
[[ 1. 1. 1.] [ 1. 2. 4.] [ 1. 3. 9.] [ 1. 4. 16.]] [-4.5 3.2 1. ] 1.8 3 [ 19.62136402 1.71206987 0.26625288]
正規方程式によるのも...¶
lstsqは正規方程式によるのと同じかな.SVDかも.
Ai = linalg.inv(np.dot(np.transpose(Av),Av))
b = np.dot(np.transpose(Av), ydata)
np.dot(Ai,b)
array([-4.5, 3.2, 1. ])
2次元曲面へのフィット¶
先程の一般化をより発展させると,3次元$(x_i, y_i, z_i)$で提供されるデータへの,2次元平面でのフィットも可能となる.2次元の単純な曲面は,方程式を使って,
$$ F(x, y) = a_1+a_2\,x+a_3\,y+a_4\,xy+a_5\,x^2+a_6\,y^2 $$となる.デザイン行列の$i$行目の要素は,
$$ [1,\, x_i,\, y_i,\, x_i \, y_i,\, x_i^2,\, y_i^2] $$として,それぞれ求める.このデータの変換の様子をpythonスクリプトで詳しく示した.後は,通常の正規方程式を解くようにすれば,このデータを近似する曲面を定めるパラメータ$a_1, a_2, \cdots,a_6$が求まる.最小二乗法はパラメータ$a_k$について線形であればよい.
具体例¶
実際のデータ解析での例.データの座標をx,y,zで用意して,scipy.linalgのlinalg.lstsqでfitしている. 正規方程式による解法,つまり逆行列で求めた値と一致していることを確認してください.
import numpy as np
z = np.array([0.000046079702088, 0.000029479057275,
0.000025769637830, 0.000034951410953, 0.000057024385455, 0.000029485453808,
0.000011519913869, 0.000006442404299, 0.000014252898382, 0.000034951410953,
0.000025769637773, 0.000006442404242, 0.000000000000057, 0.000006442404242,
0.000025769637773, 0.000034932221524, 0.000014246501905, 0.000006442404299,
0.000011519913926, 0.000029479057332, 0.000056973214100, 0.000034932221467,
0.000025769637773, 0.000029485453808, 0.000046079702031])
x = []
y = []
for i in range(-2,3):
for j in range(-2,3):
x.append(i*0.0005)
y.append(j*0.0005)
print(x)
print(y)
[-0.001, -0.001, -0.001, -0.001, -0.001, -0.0005, -0.0005, -0.0005, -0.0005, -0.0005, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0005, 0.0005, 0.0005, 0.0005, 0.0005, 0.001, 0.001, 0.001, 0.001, 0.001] [-0.001, -0.0005, 0.0, 0.0005, 0.001, -0.001, -0.0005, 0.0, 0.0005, 0.001, -0.001, -0.0005, 0.0, 0.0005, 0.001, -0.001, -0.0005, 0.0, 0.0005, 0.001, -0.001, -0.0005, 0.0, 0.0005, 0.001]
%matplotlib notebook
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
import numpy as np
fig = plt.figure()
plot3d = Axes3D(fig)
plot3d.scatter3D(np.array(x),np.array(y),z)
plt.show()

from pprint import pprint
import scipy.linalg as linalg
n = z.size
n_j = 6
bb=np.zeros([n])
A=np.zeros([n,n_j])
for i in range(0,n):
A[i,0]=1
A[i,1]=x[i]
A[i,2]=y[i]
A[i,3]=x[i]*y[i]
A[i,4]=x[i]**2
A[i,5]=y[i]**2
bb[i]=z[i]
c, resid, rank, sigma = linalg.lstsq(A, bb)
pprint(c)
Ai = linalg.inv(np.dot(np.transpose(A),A))
b = np.dot(np.transpose(A),bb)
np.dot(Ai,b)
array([ -9.18521214e-13, -6.39644676e-06, 6.39644220e-06,
-5.45955358e+00, 2.57696284e+01, 2.57696284e+01])
array([ -9.18525708e-13, -6.39644676e-06, 6.39644220e-06,
-5.45955358e+00, 2.57696284e+01, 2.57696284e+01])
def z_surf(xx,yy):
val = c[0] + c[1]*xx + c[2]*yy
val += c[3]*xx*yy + c[4]*xx**2
val += c[5]*yy**2
return val
x1 = np.arange(-0.001, 0.00125, 0.00025)
y1 = np.arange(-0.001, 0.00125, 0.00025)
X, Y = np.meshgrid(x1, y1)
Z1 = z_surf(X,Y)
fig = plt.figure()
plot3d = Axes3D(fig)
plot3d.scatter(np.array(x),np.array(y),z, color='r')
plot3d.plot_surface(X,Y,Z1)
plt.show()

課題¶
1次元の線形最小二乗法¶
次の4点のデータを$y = a_0+a_1 x+a_2 x^2$で近似せよ(2006年度期末試験).
xdata = np.array([1,2,3,4])
ydata = np.array([1,3,4,10])
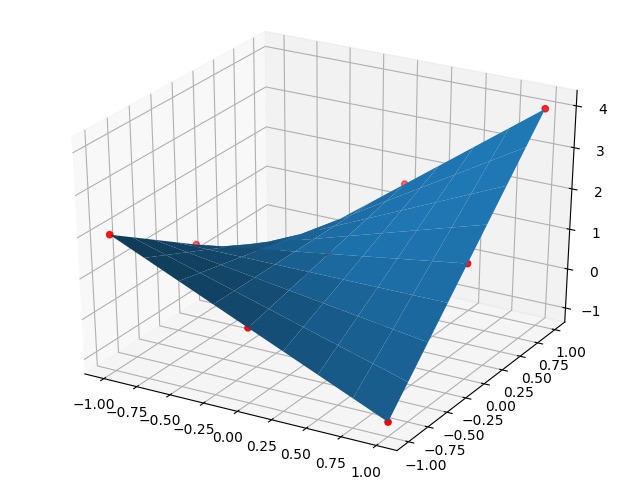
2次元の最小二乗フィット¶
以下のデータを
$$ f(x, y) = a_0+a_1 x+a_2 y+a_3 xy $$で近似せよ
x, y, z
-1, -1, 2.00000
-1, 0, 0.50000
-1, 1, -1.00000
0, -1, 0.50000
0, 0, 1.00000
0, 1, 1.50000
1, -1, -1.00000
1, 0, 1.50000
1, 1, 4.00000
結果は以下の通り.鞍点になってます.