Scanning process¶
In this article is explained the algorithm used to scan an object with a 3D laser scanner over a turntable.
Complete algorithm¶
The algorithms consists on capture "line point clouds" for each angle of the platform, from 0 to 360 degrees.
This is the process for each iteration:
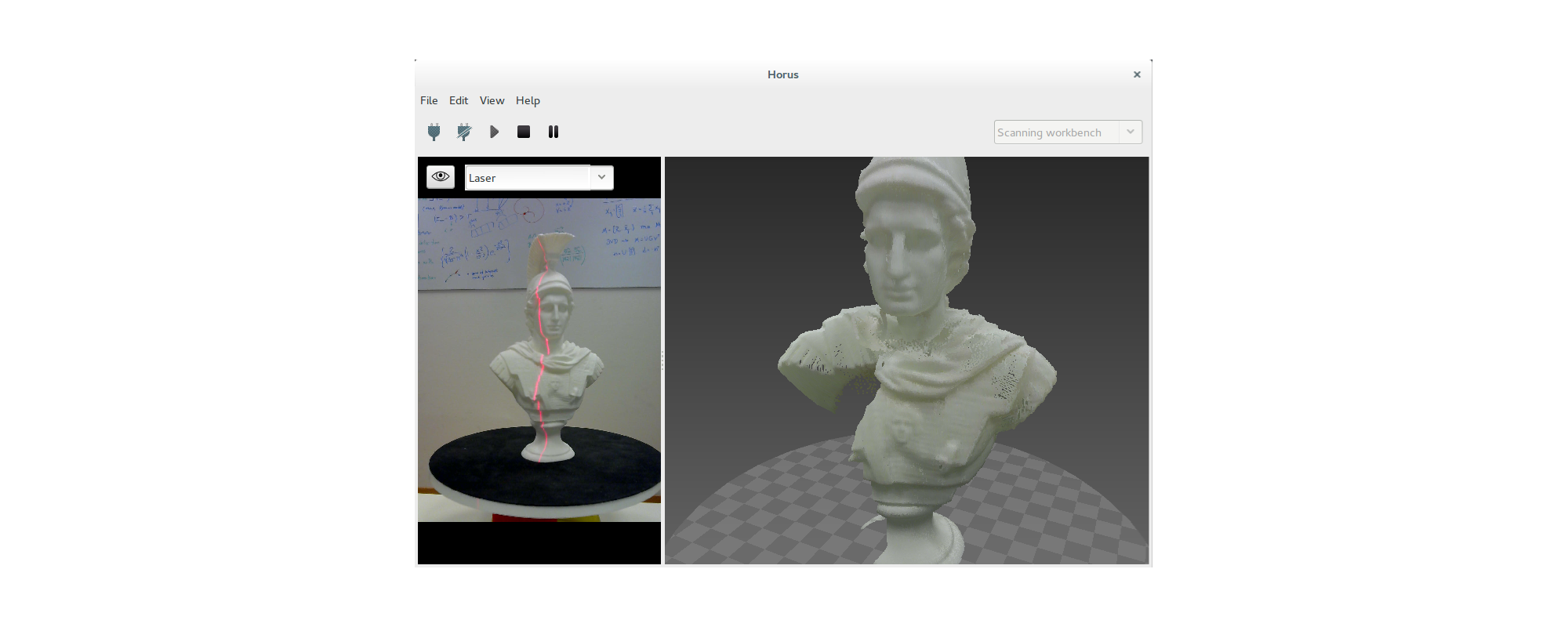
Capture texture: sets texture camera settings and captures an image in order to include the color of the scanned object.
Capture lasers: sets laser camera settings and captures the correspondent images for the selected lasers.
Laser segmentation: from laser image captures, 2d points are obtained using laser segmentation.
Point cloud generation: from 2d points and all calibration parameters final point cloud in world coordinate system is obtained using point cloud generation.
Finally, all the "line point clouds" computed are merged into a common final point cloud.
Time cost¶
Motor movement¶
Total time of motor movement can be obtained using $v$, the motor speed, and $a$ the motor acceleration. It can be defined two possible situations, depending also on the step $S$. $$ T_l = \frac{2·v_{max}}{a} \:\:\:\:\:\: S_l = \frac{{v}^2_{max}}{a} $$
$S < Sl$¶
Maximum speed is not reached. Total time only depends on displacement and acceleration. $ T = 2 \: \sqrt{\frac{S}{a}} $
$S > Sl$¶
Maximum speed is reached. Total time has a new expression. $ T = \frac{S+S_l}{a} $
Image capture¶
Experimentally, it is determined that each image costs 66 ms to be captured. Also, flip, transpose and format color conversion increases 4 ms, 5 ms and 2.5 ms respectively.