#!/usr/bin/env python
# coding: utf-8
# # 
# Why Self-Driving Cars?
#
#  #
#  #
# # Cars are a good thing
#
#
#
# # Cars are a good thing
#
#  # # Cars helps us move
# # 1 billion cars worldwide
# # Transportation
# # Shape the cities, roads, world...
#
# # Cars helps us move
# # 1 billion cars worldwide
# # Transportation
# # Shape the cities, roads, world...
#  #
#
#
# - Filipinos spend 16 days a year on traffic
#
# - Loosing 2,663 sgd inconme
#
# - Comuters in Singapore spend 30 mins in traffic
#
# - 19 looking for parking spot
#
#
#
#
#
# source: straitstimes.com
#  #
#
#
# - 24,000 deaths anually in Thailand
#
# - Loses 3 to 5 % of its GDP
#
# - 10,000 injured each year in SG
#
#
#
#
#
# sources: World Health Organization and police.gov.sg
#
# # Road fatality one of the top 10 global causes of deaths
# But... How?
#  #
# 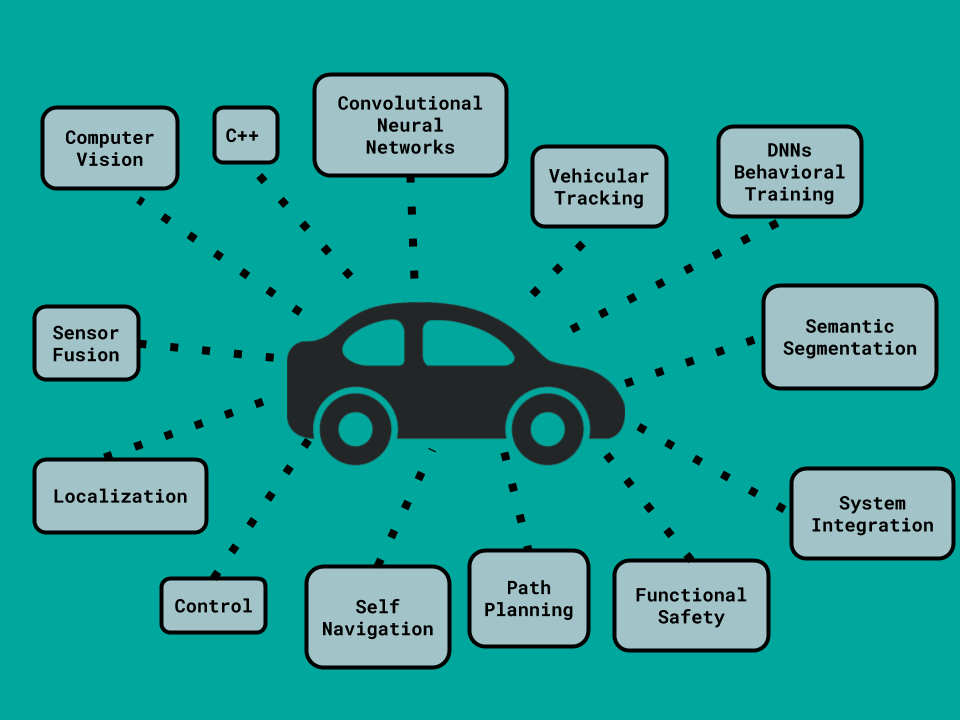 #
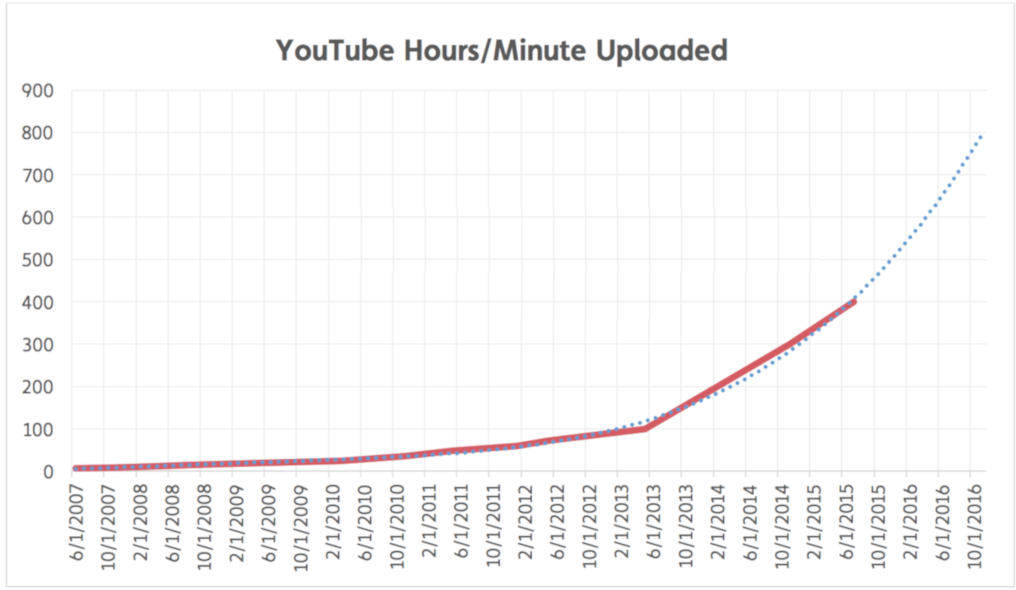
# Why Computer Vision?
#
#  #
#  #
#
#
# - Cisco Visual Networking Index:
#
# - 5 million years to watch one month - 2021
# - 82% of global traffic
# - Video surveillance traffic increased 72%
# - Virtual and augmented reality traffic will increase 20 times
#
#
#
#  # # Computer vision engineer:
#
# # Computer vision engineer:
#
#
# ## IT job that will be most in demand in 2020 *
# ## More than 190k sgd salary in the US **
#
#
# *source: techproresearch.com
# **source: indeed.com
# # First rule of presentations:
# # Don't demo!
# Let's demo!
#  #
# In[1]:
import matplotlib.pyplot as plt
import cv2
import os
import numpy as np
from moviepy.editor import VideoFileClip
from collections import deque
get_ipython().run_line_magic('matplotlib', 'inline')
get_ipython().run_line_magic('config', "InlineBackend.figure_format = 'retina'")
# In[2]:
def convert_to_hls(image):
return cv2.cvtColor(image, cv2.COLOR_RGB2HLS)
def select_white(image):
converted = convert_to_hls(image)
# white color mask
lower = np.uint8([ 0, 110, 0])
upper = np.uint8([255, 180, 250])
white_mask = cv2.inRange(converted, lower, upper)
masked = cv2.bitwise_and(image, image, mask = white_mask)
return masked
def convert_to_grayscale(image):
return cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
def smoothing(image, kernel_size=15):
return cv2.GaussianBlur(image, (kernel_size, kernel_size), 0)
def detect_edges(image, low_threshold=10, high_threshold=100):
return cv2.Canny(image, low_threshold, high_threshold)
def filter_region(image, vertices):
mask = np.zeros_like(image)
if len(mask.shape)==2:
cv2.fillPoly(mask, vertices, 255)
else:
cv2.fillPoly(mask, vertices, (255,)*mask.shape[2])
return cv2.bitwise_and(image, mask)
def select_region(image):
rows, cols = image.shape[:2]
bottom_left = [int(cols*0.2), int(rows*0.95)]
top_left = [int(cols*0.5), int(rows*0.65)]
bottom_right = [int(cols*0.95), int(rows*0.95)]
top_right = [int(cols*0.65), int(rows*0.65)]
vertices = np.array([[bottom_left, top_left, top_right, bottom_right]], dtype=np.int32)
return filter_region(image, vertices)
def hough_lines(image):
return cv2.HoughLinesP(image, rho=1, theta=np.pi/180, threshold=5, minLineLength=5, maxLineGap=200)
def average_slope_intercept(lines):
left_lines = []
left_weights = []
right_lines = []
right_weights = []
for line in lines:
for x1, y1, x2, y2 in line:
if x2==x1:
continue
slope = (y2-y1)/(x2-x1)
intercept = y1 - slope*x1
length = np.sqrt((y2-y1)**2+(x2-x1)**2)
if slope < 0:
left_lines.append((slope, intercept))
left_weights.append((length))
else:
right_lines.append((slope, intercept))
right_weights.append((length))
left_lane = np.dot(left_weights, left_lines) /np.sum(left_weights) if len(left_weights) >0 else None
right_lane = np.dot(right_weights, right_lines)/np.sum(right_weights) if len(right_weights)>0 else None
return left_lane, right_lane
def calculate_line_points(y1, y2, line):
if line is None:
return None
slope, intercept = line
x1 = int((y1 - intercept)/slope)
x2 = int((y2 - intercept)/slope)
y1 = int(y1)
y2 = int(y2)
return ((x1, y1), (x2, y2))
def lane_lines(image, lines):
left_lane, right_lane = average_slope_intercept(lines)
y1 = image.shape[0]
y2 = y1*0.7
left_line = calculate_line_points(y1, y2, left_lane)
right_line = calculate_line_points(y1, y2, right_lane)
return left_line, right_line
def draw_lane_lines(image, lines, color=[0, 0, 255], thickness=20):
line_image = np.zeros_like(image)
for line in lines:
if line is not None:
cv2.line(line_image, *line, color, thickness)
return cv2.addWeighted(image, 1.0, line_image, 0.9, 0.0)
# In[ ]:
class LanesDetector:
def __init__(self):
self.left_lines = deque(maxlen=50)
self.right_lines = deque(maxlen=50)
def mean_line(self, line, lines):
if line is not None:
lines.append(line)
if len(lines)>0:
line = np.mean(lines, axis=0, dtype=np.int32)
line = tuple(map(tuple, line))
return line
def process(self, image):
white = select_white(image)
gray = convert_to_grayscale(white)
smooth_gray = smoothing(gray)
edges = detect_edges(smooth_gray)
regions = select_region(edges)
lines = hough_lines(regions)
left_line, right_line = lane_lines(image, lines)
left_line = self.mean_line(left_line, self.left_lines)
right_line = self.mean_line(right_line, self.right_lines)
return draw_lane_lines(image, (left_line, right_line))
def process_video(video_input, video_output):
detector = LanesDetector()
clip = VideoFileClip(os.path.join('data', video_input))
processed = clip.fl_image(detector.process)
processed.write_videofile(os.path.join('data', video_output), audio=False)
get_ipython().run_line_magic('time', "process_video('singapore_drive.mp4', 'detected_lanes.mp4')")
#
#
#
# In[1]:
import matplotlib.pyplot as plt
import cv2
import os
import numpy as np
from moviepy.editor import VideoFileClip
from collections import deque
get_ipython().run_line_magic('matplotlib', 'inline')
get_ipython().run_line_magic('config', "InlineBackend.figure_format = 'retina'")
# In[2]:
def convert_to_hls(image):
return cv2.cvtColor(image, cv2.COLOR_RGB2HLS)
def select_white(image):
converted = convert_to_hls(image)
# white color mask
lower = np.uint8([ 0, 110, 0])
upper = np.uint8([255, 180, 250])
white_mask = cv2.inRange(converted, lower, upper)
masked = cv2.bitwise_and(image, image, mask = white_mask)
return masked
def convert_to_grayscale(image):
return cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
def smoothing(image, kernel_size=15):
return cv2.GaussianBlur(image, (kernel_size, kernel_size), 0)
def detect_edges(image, low_threshold=10, high_threshold=100):
return cv2.Canny(image, low_threshold, high_threshold)
def filter_region(image, vertices):
mask = np.zeros_like(image)
if len(mask.shape)==2:
cv2.fillPoly(mask, vertices, 255)
else:
cv2.fillPoly(mask, vertices, (255,)*mask.shape[2])
return cv2.bitwise_and(image, mask)
def select_region(image):
rows, cols = image.shape[:2]
bottom_left = [int(cols*0.2), int(rows*0.95)]
top_left = [int(cols*0.5), int(rows*0.65)]
bottom_right = [int(cols*0.95), int(rows*0.95)]
top_right = [int(cols*0.65), int(rows*0.65)]
vertices = np.array([[bottom_left, top_left, top_right, bottom_right]], dtype=np.int32)
return filter_region(image, vertices)
def hough_lines(image):
return cv2.HoughLinesP(image, rho=1, theta=np.pi/180, threshold=5, minLineLength=5, maxLineGap=200)
def average_slope_intercept(lines):
left_lines = []
left_weights = []
right_lines = []
right_weights = []
for line in lines:
for x1, y1, x2, y2 in line:
if x2==x1:
continue
slope = (y2-y1)/(x2-x1)
intercept = y1 - slope*x1
length = np.sqrt((y2-y1)**2+(x2-x1)**2)
if slope < 0:
left_lines.append((slope, intercept))
left_weights.append((length))
else:
right_lines.append((slope, intercept))
right_weights.append((length))
left_lane = np.dot(left_weights, left_lines) /np.sum(left_weights) if len(left_weights) >0 else None
right_lane = np.dot(right_weights, right_lines)/np.sum(right_weights) if len(right_weights)>0 else None
return left_lane, right_lane
def calculate_line_points(y1, y2, line):
if line is None:
return None
slope, intercept = line
x1 = int((y1 - intercept)/slope)
x2 = int((y2 - intercept)/slope)
y1 = int(y1)
y2 = int(y2)
return ((x1, y1), (x2, y2))
def lane_lines(image, lines):
left_lane, right_lane = average_slope_intercept(lines)
y1 = image.shape[0]
y2 = y1*0.7
left_line = calculate_line_points(y1, y2, left_lane)
right_line = calculate_line_points(y1, y2, right_lane)
return left_line, right_line
def draw_lane_lines(image, lines, color=[0, 0, 255], thickness=20):
line_image = np.zeros_like(image)
for line in lines:
if line is not None:
cv2.line(line_image, *line, color, thickness)
return cv2.addWeighted(image, 1.0, line_image, 0.9, 0.0)
# In[ ]:
class LanesDetector:
def __init__(self):
self.left_lines = deque(maxlen=50)
self.right_lines = deque(maxlen=50)
def mean_line(self, line, lines):
if line is not None:
lines.append(line)
if len(lines)>0:
line = np.mean(lines, axis=0, dtype=np.int32)
line = tuple(map(tuple, line))
return line
def process(self, image):
white = select_white(image)
gray = convert_to_grayscale(white)
smooth_gray = smoothing(gray)
edges = detect_edges(smooth_gray)
regions = select_region(edges)
lines = hough_lines(regions)
left_line, right_line = lane_lines(image, lines)
left_line = self.mean_line(left_line, self.left_lines)
right_line = self.mean_line(right_line, self.right_lines)
return draw_lane_lines(image, (left_line, right_line))
def process_video(video_input, video_output):
detector = LanesDetector()
clip = VideoFileClip(os.path.join('data', video_input))
processed = clip.fl_image(detector.process)
processed.write_videofile(os.path.join('data', video_output), audio=False)
get_ipython().run_line_magic('time', "process_video('singapore_drive.mp4', 'detected_lanes.mp4')")
#
# But... How?
#
# Learn the ways of Computer Vision you must...
#
#  # # The tool
#
#
# # The tool
#
#  #
#
# In[4]:
import matplotlib.pyplot as plt
import cv2
import os
import numpy as np
from moviepy.editor import VideoFileClip
from collections import deque
get_ipython().run_line_magic('matplotlib', 'inline')
get_ipython().run_line_magic('config', "InlineBackend.figure_format = 'retina'")
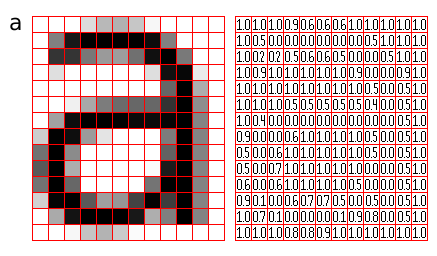
# # What's an image?
#
#
#
#
# In[4]:
import matplotlib.pyplot as plt
import cv2
import os
import numpy as np
from moviepy.editor import VideoFileClip
from collections import deque
get_ipython().run_line_magic('matplotlib', 'inline')
get_ipython().run_line_magic('config', "InlineBackend.figure_format = 'retina'")
# # What's an image?
#
#  #
#  # In[ ]:
def show_image(image, cmap=None):
plt.figure(figsize=(11,11))
if len(image.shape)==2:
cmap = 'gray'
else:
image=cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.imshow(image, cmap)
plt.xticks([])
plt.yticks([])
plt.show()
#Read the image with OpenCV
image = cv2.imread('data/test_image.png')
show_image(image)
# In[ ]:
image.shape
# In[ ]:
image[0,0]
# # Masks:
# ## Matrix with some pixel values to zero and others to non zero
# ## Output of algorithms will be used as a mask
# ## Used to select parts of the image
#
#
# In[ ]:
def show_image(image, cmap=None):
plt.figure(figsize=(11,11))
if len(image.shape)==2:
cmap = 'gray'
else:
image=cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.imshow(image, cmap)
plt.xticks([])
plt.yticks([])
plt.show()
#Read the image with OpenCV
image = cv2.imread('data/test_image.png')
show_image(image)
# In[ ]:
image.shape
# In[ ]:
image[0,0]
# # Masks:
# ## Matrix with some pixel values to zero and others to non zero
# ## Output of algorithms will be used as a mask
# ## Used to select parts of the image
#
#  # In[ ]:
def select_white(image):
# white color mask
lower = np.uint8([200, 200, 200])
upper = np.uint8([255, 255, 255])
white_mask = cv2.inRange(image, lower, upper)
masked = cv2.bitwise_and(image, image, mask = white_mask)
return masked
show_image(select_white(image))
# # Images Representation
#
# In[ ]:
def select_white(image):
# white color mask
lower = np.uint8([200, 200, 200])
upper = np.uint8([255, 255, 255])
white_mask = cv2.inRange(image, lower, upper)
masked = cv2.bitwise_and(image, image, mask = white_mask)
return masked
show_image(select_white(image))
# # Images Representation
#  # In[ ]:
def convert_to_hsv(image):
return cv2.cvtColor(image, cv2.COLOR_RGB2HSV)
show_image(convert_to_hsv(image))
# In[ ]:
def convert_to_hls(image):
return cv2.cvtColor(image, cv2.COLOR_RGB2HLS)
show_image(convert_to_hls(image))
# In[ ]:
def select_white(image):
converted = convert_to_hls(image)
# white color mask
lower = np.uint8([ 0, 110, 0])
upper = np.uint8([255, 180, 250])
white_mask = cv2.inRange(converted, lower, upper)
masked = cv2.bitwise_and(image, image, mask = white_mask)
return masked
white_selection = select_white(image)
show_image(white_selection)
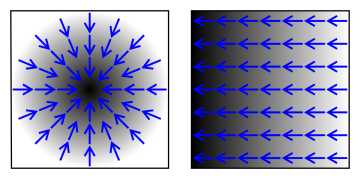
# # Canny Edges
#
# ## A multi-stage algorithm:
#
# #### 1. Gaussian filter
# #### 2. Finds edge gradient and direction for each pixel
#
#
# In[ ]:
def convert_to_hsv(image):
return cv2.cvtColor(image, cv2.COLOR_RGB2HSV)
show_image(convert_to_hsv(image))
# In[ ]:
def convert_to_hls(image):
return cv2.cvtColor(image, cv2.COLOR_RGB2HLS)
show_image(convert_to_hls(image))
# In[ ]:
def select_white(image):
converted = convert_to_hls(image)
# white color mask
lower = np.uint8([ 0, 110, 0])
upper = np.uint8([255, 180, 250])
white_mask = cv2.inRange(converted, lower, upper)
masked = cv2.bitwise_and(image, image, mask = white_mask)
return masked
white_selection = select_white(image)
show_image(white_selection)
# # Canny Edges
#
# ## A multi-stage algorithm:
#
# #### 1. Gaussian filter
# #### 2. Finds edge gradient and direction for each pixel
#
#  #
# #### 3. Pixels are checked for local maximum in its neighborhood in the direction of gradient.
# #### 4. Hysteresis Thresholding: Uses minVal and maxVal as threshold of intensity gradient to finally detect the edges. Those in between are selected based on their connectivity.
#
# cv2.Canny()
# # Canny Edges
#
# ### Good For:
#
#
#
# #### 3. Pixels are checked for local maximum in its neighborhood in the direction of gradient.
# #### 4. Hysteresis Thresholding: Uses minVal and maxVal as threshold of intensity gradient to finally detect the edges. Those in between are selected based on their connectivity.
#
# cv2.Canny()
# # Canny Edges
#
# ### Good For:
#
#
#
# - Edge detection
# - Preprocessing of images prior to lines or shapes detection
#
#
#
# ### Major Drawbacks:
#
#
#
# - Edge detection is sensitive to noise in the image
# - General thresholding problems apply
#
#
#
#
#
# ### Important tips:
#
#
#
# - The smoothing directly affects results
# - Larger blurry kernels are more useful for detecting larger smother edges
#
#
# # Convert to grayscale
#
# Since Canny measures the gradient
# In[ ]:
def convert_to_gray_scale(image):
return cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
gray_selection = convert_to_gray_scale(white_selection)
show_image(gray_selection)
# # Gaussian Blur
# ## Remove Noise from Images
# ## Blur images using Gussian filter
#
# cv2.GaussianBlur()
# # Gaussian Blur
#
# 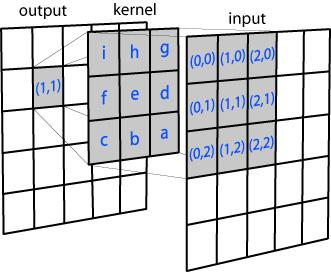
 # # Gaussian Blur
#
# ## Edges: intensity changes rapidly
# ## Making edges smother to reduce noise
# ## Kernel size (smaller values if effect is similar)
# In[ ]:
def smoothing(image, kernel_size=15):
return cv2.GaussianBlur(image, (kernel_size, kernel_size), 0)
smooth_image = smoothing(gray_selection)
show_image(smooth_image)
# # Canny Edges (OpenCV)
#
# ### Selection based on pixel gradient :
#
#
# # Gaussian Blur
#
# ## Edges: intensity changes rapidly
# ## Making edges smother to reduce noise
# ## Kernel size (smaller values if effect is similar)
# In[ ]:
def smoothing(image, kernel_size=15):
return cv2.GaussianBlur(image, (kernel_size, kernel_size), 0)
smooth_image = smoothing(gray_selection)
show_image(smooth_image)
# # Canny Edges (OpenCV)
#
# ### Selection based on pixel gradient :
#
#
#
# - Higher than the upper threshold: Accepted
# - Below the lower threshold: Rejected
# - Between the two: Accepted if connected to a pixel that is above the upper threshold
#
#
#
# ### Important tips:
#
#
#
# - Recommended a upper:lower ratio between 2:1 and 3:1
# - Use trials and errors
#
#
#
#
# In[ ]:
def detect_edges(image, low_threshold=10, high_threshold=100):
return cv2.Canny(image, low_threshold, high_threshold)
edges_image = detect_edges(smooth_image)
show_image(edges_image)
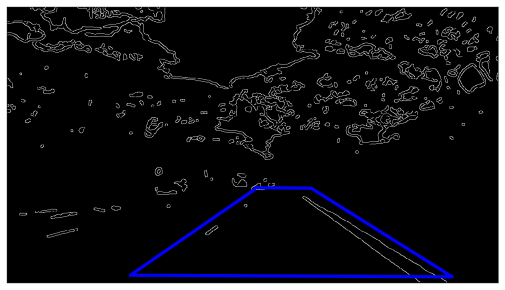
# # Region Of Interest (ROI)
#
#
# Exclude the rest of the image by applying a mask
#
#  # In[ ]:
def filter_region(image, vertices):
mask = np.zeros_like(image)
if len(mask.shape)==2:
cv2.fillPoly(mask, vertices, 255)
else:
cv2.fillPoly(mask, vertices, (255,)*mask.shape[2]) # in case, the input image has a channel dimension
return cv2.bitwise_and(image, mask)
def select_region(image):
rows, cols = image.shape[:2]
bottom_left = [int(cols*0.2), int(rows*0.95)]
top_left = [int(cols*0.5), int(rows*0.65)]
bottom_right = [int(cols*0.95), int(rows*0.95)]
top_right = [int(cols*0.65), int(rows*0.65)]
vertices = np.array([[bottom_left, top_left, top_right, bottom_right]], dtype=np.int32)
#image = cv2.line(image, tuple(bottom_left), tuple(top_left), (255,0,0), thickness=5)
#image = cv2.line(image, tuple(bottom_right), tuple(top_right), (255,0,0), thickness=5)
return filter_region(image, vertices)
roi_image = select_region(edges_image)
show_image(roi_image)
# # Hough Transform
#
# ## Detect any shape (mathematical form)
# ## Uses a voting procedure (acumulator)
#
#
#
# # Hough Transform: Line
#
#
# In[ ]:
def filter_region(image, vertices):
mask = np.zeros_like(image)
if len(mask.shape)==2:
cv2.fillPoly(mask, vertices, 255)
else:
cv2.fillPoly(mask, vertices, (255,)*mask.shape[2]) # in case, the input image has a channel dimension
return cv2.bitwise_and(image, mask)
def select_region(image):
rows, cols = image.shape[:2]
bottom_left = [int(cols*0.2), int(rows*0.95)]
top_left = [int(cols*0.5), int(rows*0.65)]
bottom_right = [int(cols*0.95), int(rows*0.95)]
top_right = [int(cols*0.65), int(rows*0.65)]
vertices = np.array([[bottom_left, top_left, top_right, bottom_right]], dtype=np.int32)
#image = cv2.line(image, tuple(bottom_left), tuple(top_left), (255,0,0), thickness=5)
#image = cv2.line(image, tuple(bottom_right), tuple(top_right), (255,0,0), thickness=5)
return filter_region(image, vertices)
roi_image = select_region(edges_image)
show_image(roi_image)
# # Hough Transform
#
# ## Detect any shape (mathematical form)
# ## Uses a voting procedure (acumulator)
#
#
#
# # Hough Transform: Line
#
#
#
# - rho: Distance resolution of the accumulator in pixels.
# - theta: Angle resolution of the accumulator in radians.
# - threshold: Accumulator threshold parameter. Only those lines are returned that get enough votes (> `threshold`)
# - minLineLength: Minimum line length. Line segments shorter than that are rejected
# - maxLineGap: Maximum allowed gap between points on the same line to link them
#
#
#
# In[ ]:
def draw_lines(image, lines, color=[0, 255, 0], thickness=2, make_copy=True):
# the lines returned by cv2.HoughLinesP has the shape (-1, 1, 4)
if make_copy:
image = np.copy(image) # don't want to modify the original
for line in lines:
for x1,y1,x2,y2 in line:
cv2.line(image, (x1, y1), (x2, y2), color, thickness)
return image
def hough_lines(image):
return cv2.HoughLinesP(image, rho=1, theta=np.pi/180, threshold=5, minLineLength=5, maxLineGap=200)
lines = hough_lines(roi_image)
image_with_lines = draw_lines(image, lines)
show_image(image_with_lines)
# # Average lines
#
#
#
# - Multiple lines are detected for each lane
# - Only partially recognized
# - Extrapolate line to cover the full lane
# - Two lanes:
#
# - left with positive slope
# - right with negative slope
#
#
#
#
# ### Note: image has the `y` reversed
# In[ ]:
def average_slope_intercept(lines):
left_lines = [] # (slope, intercept)
left_weights = [] # (length,)
right_lines = [] # (slope, intercept)
right_weights = [] # (length,)
for line in lines:
for x1, y1, x2, y2 in line:
if x2==x1:
continue # ignore a vertical line
slope = (y2-y1)/(x2-x1)
intercept = y1 - slope*x1
length = np.sqrt((y2-y1)**2+(x2-x1)**2)
if slope < 0: # y is reversed in image
left_lines.append((slope, intercept))
left_weights.append((length))
else:
right_lines.append((slope, intercept))
right_weights.append((length))
left_lane = np.dot(left_weights, left_lines) /np.sum(left_weights) if len(left_weights) >0 else None
right_lane = np.dot(right_weights, right_lines)/np.sum(right_weights) if len(right_weights)>0 else None
return left_lane, right_lane
# # Drawing the lanes
#
# Need to convert to pixel points for cv2.line()
# In[ ]:
def calculate_line_points(y1, y2, line):
if line is None:
return None
slope, intercept = line
x1 = int((y1 - intercept)/slope)
x2 = int((y2 - intercept)/slope)
y1 = int(y1)
y2 = int(y2)
return ((x1, y1), (x2, y2))
# # Drawing the lanes
#
# ## Each line is a list of x1, y1, x2, y2
#
#
#
# - Each line is a list of x1, y1, x2, y2
# - Use cv2.line() to draw the lines
# - Use cv2.addWeighted() to mix the images
#
#
#
#
#
# In[ ]:
def lane_lines(image, lines):
left_lane, right_lane = average_slope_intercept(lines)
y1 = image.shape[0]
y2 = y1*0.7
left_line = calculate_line_points(y1, y2, left_lane)
right_line = calculate_line_points(y1, y2, right_lane)
return left_line, right_line
def draw_lane_lines(image, lines, color=[0, 255, 0], thickness=20):
line_image = np.zeros_like(image)
for line in lines:
if line is not None:
cv2.line(line_image, *line, color, thickness)
return cv2.addWeighted(image, 1.0, line_image, 0.9, 0.0)
lanes_detected = draw_lane_lines(image, lane_lines(image, lines))
show_image(lanes_detected)
# # C.V. Pipeline
# In[ ]:
class LanesDetector:
def __init__(self):
self.left_lines = deque(maxlen=50)
self.right_lines = deque(maxlen=50)
def mean_line(self, line, lines):
if line is not None:
lines.append(line)
if len(lines)>0:
line = np.mean(lines, axis=0, dtype=np.int32)
line = tuple(map(tuple, line))
return line
def process(self, image):
white_yellow = select_white(image)
gray = convert_to_gray_scale(white_yellow)
smooth_gray = smoothing(gray)
edges = detect_edges(smooth_gray)
regions = select_region(edges)
lines = hough_lines(regions)
left_line, right_line = lane_lines(image, lines)
left_line = self.mean_line(left_line, self.left_lines)
right_line = self.mean_line(right_line, self.right_lines)
return draw_lane_lines(image, (left_line, right_line))
# # Let's process the video!
# In[ ]:
def process_video(video_input, video_output):
detector = LanesDetector()
clip = VideoFileClip(os.path.join('data', video_input))
processed = clip.fl_image(detector.process)
processed.write_videofile(os.path.join('data', video_output), audio=False)
get_ipython().run_line_magic('time', "process_video('singapore_drive.mp4', 'our_brand_new_detected_lanes.mp4')")
#
#  #
#
#
# 92% of space is unsused
# ## 1.3 million people die in road crashes each year
# ## An average 3,287 deaths a day
# ## Leading cause of death among young people (15-29)
#
#
#
#
source: Association for Safe International Road Travel
#  #
# A Self Driving Cars Degree!
#
#  #
# # Computer Vision: Sign up now!
#
#
# # Computer Vision: Sign up now!
#
#  #
#
#
# # Thanks!
#
#
#
#
# marco@upcodeacademy.com
#
# 