#!/usr/bin/env python
# coding: utf-8
# Frequency Response to Harmonic Direct-Force Inputs
# MCHE 485: Mechanical Vibrations
# Dr. Joshua Vaughan
# joshua.vaughan@louisiana.edu
# http://www.ucs.louisiana.edu/~jev9637/
#
# 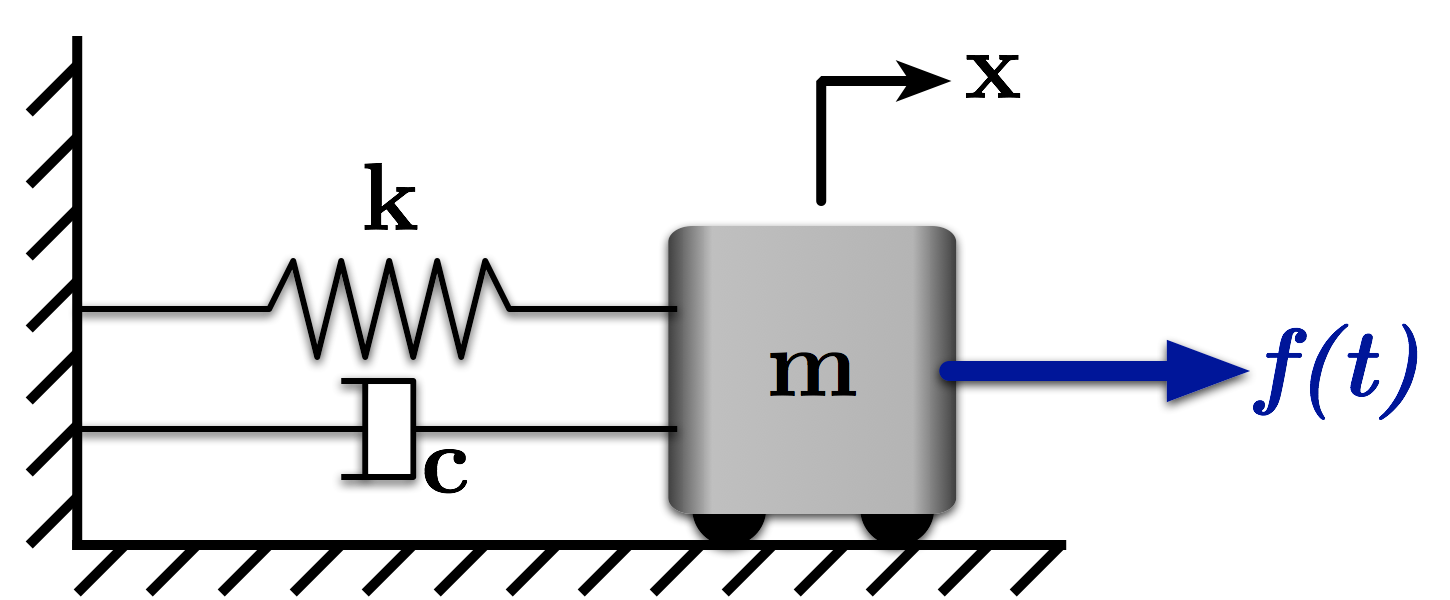
# Figure 1: A Mass-Spring-Damper System
#
#
# This notebook examines the frequency response of a mass-spring-damper system like the one shown in Figure 1 to a harmonic, direct-force input.
#
# The equation of motion for the system is:
#
#
# $ \quad m \ddot{x} + c \dot{x} + kx = f $
#
# We could also write this equation in terms of the damping ratio, $\zeta$, and natural frequency, $\omega_n$.
#
# $ \quad \ddot{x} + 2\zeta\omega_n \dot{x} + \omega_n^2x = \frac{f}{m}$
#
# For information on how to obtain this equation, you can see the lectures at the [class website](http://www.ucs.louisiana.edu/~jev9637/MCHE485.html).
# In[1]:
import numpy as np # Grab all of the NumPy functions with nickname np
# In[2]:
# We want our plots to be displayed inline, not in a separate window
get_ipython().run_line_magic('matplotlib', 'inline')
# In[3]:
# Import the plotting functions
import matplotlib.pyplot as plt
# In[4]:
# Define the System Parameters
m = 1.0 # kg
k = (2.0 * np.pi)**2 # N/m (Selected to give an undamped natrual frequency of 1Hz)
wn = np.sqrt(k / m) # Natural Frequency (rad/s)
z = 0.25 # Define a desired damping ratio
c = 2 * z * wn * m # calculate the damping coeff. to create it (N/(m/s))
# Let's use the closed-form, steady-state solution we developed in lecture:
#
# Assume:
#
# $ \quad f(t) = \bar{f} \sin{\omega t} $
#
# Then, the solution $x(t)$ should have the form:
#
# $ \quad x(t) = | x | \sin{\left( \omega t + \phi \right) } $
#
# Substituting this assumed solution into the equation of motion and solving for $ \bar{x} $ and $ \phi $:
#
# $ \quad | \bar{x} | = \frac{\bar{f}}{m} \left( \frac{1}{\sqrt{\left(\omega_n^2 - \omega^2\right)^2 + \left(2 \zeta \omega_n \right)^2}} \right) $
#
# and
#
# $ \quad \phi = \tan^{-1}\left({\frac{2 \zeta \omega_n \omega}{\omega_n^2 - \omega^2}}\right) $
#
# ### Transfer Function Form
# $ \quad \left| G(\omega) \right| = \frac{1}{m \sqrt{\left(\omega_n^2 - \omega^2\right)^2 + \left(2 \zeta \omega_n \right)^2}} $
#
# ### Normalization
# We can also nondimensionalize/normalize this by defining $ \Omega = \frac{\omega}{\omega_n} $.
#
# $ \quad \left| G(\Omega) \right| = \frac{1}{k \sqrt{\left(1 - \Omega^2\right)^2 + \left(2 \zeta \Omega \right)^2}} $
#
# and
#
# $ \quad \phi = \tan^{-1}\left({\frac{2 \zeta \Omega}{1 - \Omega^2}}\right) $
#
# Let's plot the normalized versions.
# In[5]:
# Set up input parameters
wun = np.linspace(0,5,500) # Frequency range for freq response plot, 0-4 Omega with 500 points in-between
w = np.linspace(0,5,500) # Frequency range for freq response plot, 0-4 Omega with 500 points in-between
# Let's examine a few different damping ratios
z = 0.0
mag_normal_un = 1/(k*np.sqrt((1 - w**2)**2 + (2*z*w)**2))
phase_un = -np.arctan2((2*z*w),(1 - w**2)) * 180/np.pi
# Let's mask the phase discontinuity, so it isn't plotted
pos = np.where(np.abs(k*mag_normal_un) >= 25)
phase_un[pos] = np.nan
wun[pos] = np.nan
z = 0.1
mag_normal_0p1 = 1/(k*np.sqrt((1 - w**2)**2 + (2*z*w)**2))
phase_0p1 = -np.arctan2((2*z*w),(1 - w**2)) * 180/np.pi
z = 0.2
mag_normal_0p2 = 1/(k*np.sqrt((1 - w**2)**2 + (2*z*w)**2))
phase_0p2 = -np.arctan2((2*z*w),(1 - w**2)) * 180/np.pi
z = 0.4
mag_normal_0p4 = 1/(k*np.sqrt((1 - w**2)**2 + (2*z*w)**2))
phase_0p4 = -np.arctan2((2*z*w),(1 - w**2)) * 180/np.pi
# In[6]:
# Let's plot the magnitude (normlized by k G(Omega))
# Make the figure pretty, then plot the results
# "pretty" parameters selected based on pdf output, not screen output
# Many of these setting could also be made default by the .matplotlibrc file
fig = plt.figure(figsize=(6,4))
ax = plt.gca()
plt.subplots_adjust(bottom=0.17,left=0.17,top=0.96,right=0.96)
plt.setp(ax.get_ymajorticklabels(),family='Serif',fontsize=18)
plt.setp(ax.get_xmajorticklabels(),family='Serif',fontsize=18)
ax.spines['right'].set_color('none')
ax.spines['top'].set_color('none')
ax.xaxis.set_ticks_position('bottom')
ax.yaxis.set_ticks_position('left')
ax.grid(True,linestyle=':',color='0.75')
ax.set_axisbelow(True)
plt.xlabel(r'Normalized Frequency ($\Omega$)',family='Serif',fontsize=22,weight='bold',labelpad=5)
plt.ylabel(r'$k |G(\Omega)|$',family='Serif',fontsize=22,weight='bold',labelpad=35)
plt.plot(wun, k*mag_normal_un, linewidth=2, label=r'$\zeta$ = 0.0')
plt.plot(w, k*mag_normal_0p1, linewidth=2, linestyle = '-.', label=r'$\zeta$ = 0.1')
plt.plot(w, k*mag_normal_0p2, linewidth=2, linestyle = ':', label=r'$\zeta$ = 0.2')
plt.plot(w, k*mag_normal_0p4, linewidth=2, linestyle = '--',label=r'$\zeta$ = 0.4')
plt.xlim(0,5)
plt.ylim(0,7)
leg = plt.legend(loc='upper right', fancybox=True)
ltext = leg.get_texts()
plt.setp(ltext,family='Serif',fontsize=16)
# save the figure as a high-res pdf in the current folder
# plt.savefig('Forced_Freq_Resp_mag.pdf',dpi=300)
fig.set_size_inches(9,6) # Resize the figure for better display in the notebook
# In[7]:
# Now let's plot the phase
# Plot the Phase Response
# Make the figure pretty, then plot the results
# "pretty" parameters selected based on pdf output, not screen output
# Many of these setting could also be made default by the .matplotlibrc file
fig = plt.figure(figsize=(6,4))
ax = plt.gca()
plt.subplots_adjust(bottom=0.17,left=0.17,top=0.96,right=0.96)
plt.setp(ax.get_ymajorticklabels(),family='Serif',fontsize=18)
plt.setp(ax.get_xmajorticklabels(),family='Serif',fontsize=18)
ax.spines['right'].set_color('none')
ax.spines['top'].set_color('none')
ax.xaxis.set_ticks_position('bottom')
ax.yaxis.set_ticks_position('left')
ax.grid(True,linestyle=':',color='0.75')
ax.set_axisbelow(True)
plt.xlabel(r'Normalized Frequency ($\Omega$)',family='Serif',fontsize=22,weight='bold',labelpad=5)
plt.ylabel(r'Phase (deg.)',family='Serif',fontsize=22,weight='bold',labelpad=8)
plt.plot(wun, phase_un, linewidth=2, label=r'$\zeta$ = 0.0')
plt.plot(w, phase_0p1, linewidth=2, linestyle = '-.', label=r'$\zeta$ = 0.1')
plt.plot(w, phase_0p2, linewidth=2, linestyle = ':', label=r'$\zeta$ = 0.2')
plt.plot(w, phase_0p4, linewidth=2, linestyle = '--', label=r'$\zeta$ = 0.4')
plt.xlim(0,5)
plt.ylim(-190,10)
plt.yticks([-180,-90,0])
leg = plt.legend(loc='upper right', fancybox=True)
ltext = leg.get_texts()
plt.setp(ltext,family='Serif',fontsize=16)
# save the figure as a high-res pdf in the current folder
# plt.savefig('Forced_Freq_Resp_Phase.pdf',dpi=300)
fig.set_size_inches(9,6) # Resize the figure for better display in the notebook
# In[8]:
# Let's plot the magnitude and phase as subplots, to make it easier to compare
# Make the figure pretty, then plot the results
# "pretty" parameters selected based on pdf output, not screen output
# Many of these setting could also be made default by the .matplotlibrc file
fig, (ax1, ax2) = plt.subplots(2, 1, sharex = True, figsize=(8,8))
plt.subplots_adjust(bottom=0.12,left=0.17,top=0.96,right=0.96)
plt.setp(ax.get_ymajorticklabels(),family='serif',fontsize=18)
plt.setp(ax.get_xmajorticklabels(),family='serif',fontsize=18)
ax1.spines['right'].set_color('none')
ax1.spines['top'].set_color('none')
ax1.xaxis.set_ticks_position('bottom')
ax1.yaxis.set_ticks_position('left')
ax1.grid(True,linestyle=':',color='0.75')
ax1.set_axisbelow(True)
ax2.spines['right'].set_color('none')
ax2.spines['top'].set_color('none')
ax2.xaxis.set_ticks_position('bottom')
ax2.yaxis.set_ticks_position('left')
ax2.grid(True,linestyle=':',color='0.75')
ax2.set_axisbelow(True)
plt.xlabel(r'Normalized Frequency $\left(\Omega = \frac{\omega}{\omega_n}\right)$',family='serif',fontsize=22,weight='bold',labelpad=5)
plt.xticks([0,1],['0','$\Omega = 1$'])
# Magnitude plot
ax1.set_ylabel(r'$ k|G(\Omega)| $',family='serif',fontsize=22,weight='bold',labelpad=40)
ax1.plot(wun, k*mag_normal_un, linewidth=2, label=r'$\zeta$ = 0.0')
ax1.plot(w, k*mag_normal_0p1, linewidth=2, linestyle = '-.', label=r'$\zeta$ = 0.1')
ax1.plot(w, k*mag_normal_0p2, linewidth=2, linestyle = ':', label=r'$\zeta$ = 0.2')
ax1.plot(w, k*mag_normal_0p4, linewidth=2, linestyle = '--',label=r'$\zeta$ = 0.4')
ax1.set_ylim(0.0,7.0)
ax1.set_yticks([0,1,2,3,4,5],['0', '1'])
ax1.leg = ax1.legend(loc='upper right', fancybox=True)
ltext = ax1.leg.get_texts()
plt.setp(ltext,family='Serif',fontsize=16)
# Phase plot
ax2.set_ylabel(r'$ \phi $ (deg)',family='serif',fontsize=22,weight='bold',labelpad=10)
# ax2.plot(wnorm,TFnorm_phase*180/np.pi,linewidth=2)
ax2.plot(wun, phase_un, linewidth=2, label=r'$\zeta$ = 0.0')
ax2.plot(w, phase_0p1, linewidth=2, linestyle = '-.', label=r'$\zeta$ = 0.1')
ax2.plot(w, phase_0p2, linewidth=2, linestyle = ':', label=r'$\zeta$ = 0.2')
ax2.plot(w, phase_0p4, linewidth=2, linestyle = '--', label=r'$\zeta$ = 0.4')
ax2.set_ylim(-200.0,20.0,)
ax2.set_yticks([0, -90, -180])
ax2.leg = ax2.legend(loc='upper right', fancybox=True)
ltext = ax2.leg.get_texts()
plt.setp(ltext,family='Serif',fontsize=16)
# Adjust the page layout filling the page using the new tight_layout command
plt.tight_layout(pad=0.5)
# If you want to save the figure, uncomment the commands below.
# The figure will be saved in the same directory as your IPython notebook.
# Save the figure as a high-res pdf in the current folder
# plt.savefig('MassSpring_SeismicTF.pdf',dpi=300)
fig.set_size_inches(9,9) # Resize the figure for better display in the notebook
#
# #### Licenses
# Code is licensed under a 3-clause BSD style license. See the licenses/LICENSE.md file.
#
# Other content is provided under a [Creative Commons Attribution-NonCommercial 4.0 International License](http://creativecommons.org/licenses/by-nc/4.0/), CC-BY-NC 4.0.
# In[9]:
# This cell will just improve the styling of the notebook
from IPython.core.display import HTML
import urllib.request
response = urllib.request.urlopen("https://cl.ly/1B1y452Z1d35")
HTML(response.read().decode("utf-8"))