线性系统状态空间模型¶
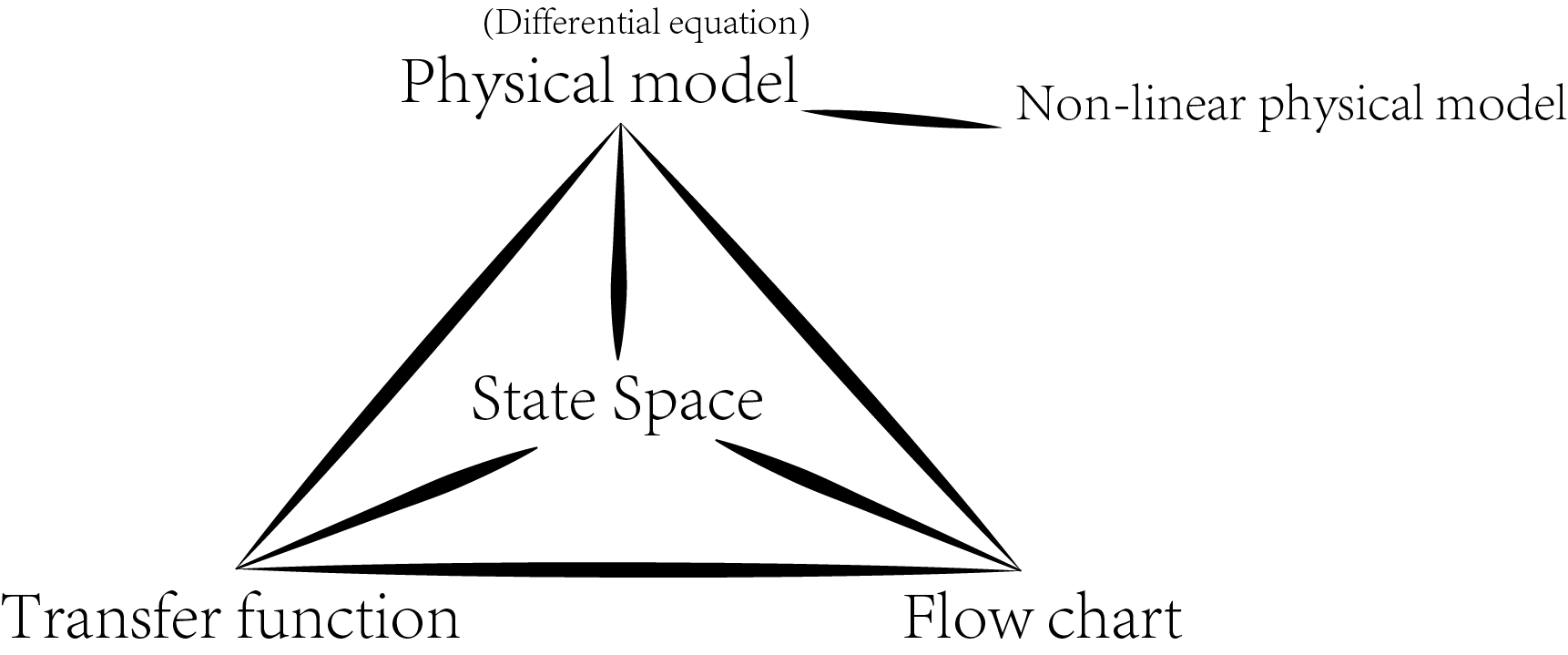
- 状态空间模型 State Space¶
通常情况下,我们把一个线性系统描写作: $$\dot X = AX + BU$$ $$Y = CX + DU$$ 当中,矩阵A被称作系统矩阵(System matrix),矩阵B被称作输入矩阵(Input matrix),矩阵C被称作输出矩阵(Output matrix),矩阵D被称作前馈矩阵(Feedthrough matrix),向量X被称作状态变量(State variable),向量U被称作输入变量(Input),向量Y被称作输出变量(Output)。
- 物理方程描述¶
状态空间模型本身就是一个形似常微分方程的模型。在线性空间里,我们可以把状态变量X升维成为一个向量,如:$X=[X,\dot X, \ddot X]^T$,那么这个状态方程可以被写作:$$\left ( \begin{matrix} \dot X \\ \ddot X \\ \dddot X \end{matrix} \right ) = \left [\begin{matrix} 0&1&0\\ 0&0&1\\ a_0&a_1&a_2 \end{matrix}\right] \left(\begin{matrix} X \\ \dot X \\ \ddot X \end{matrix} \right ) + \left [\begin{matrix} 0 \\ 0 \\ 1\end{matrix}\right]U$$ 于是,容易发现,他的物理模型是:$$\dddot X = a_0X + a_1\dot X + a_2\ddot X + U$$
在现实生活中,有很多的例子,他的物理方程是由某个高阶常微分方程构建的。对于这一类物理现象的描述,我们抽象出一个数学模型: $$y^{(n)} +a_1y^{(n-1)} + \cdots +a_ny^{(0)}=b_0u^{(n)} +b_1u^{(n-1)} +\cdots +b_nu^{(0)}$$ 我们令$$\begin{cases} \beta_0=b_0 \\ \beta_1=b_1-a_1\beta_0 \\ \beta_2 = b_2-a_2\beta_0-a_1\beta_1 \\ \vdots \end{cases}且 \begin{cases} x_1 =y -\beta_0u \\ x_2 = \dot y -\beta_1u - \beta_0\dot u \\ x_3 = \ddot y -\beta_2u -\beta_1 \dot u -\beta_0 \ddot u \\ \vdots \\ x_n = y^{(n-1)} -\beta_{n-1}u -\beta_{n-2} \dot u - \cdots -\beta_0u^{(n-1)}\end{cases}$$ 于是,有:$$\begin{cases} \dot X=\begin{bmatrix} 0&1&0&\cdots&0 \\ 0&0&1&\cdots&0 \\ \vdots&\vdots&\vdots&\ddots&\vdots \\ -a_n&-a_{n-1}&-a_{n-2}&\cdots&-a_1\end{bmatrix}X+\begin{bmatrix} \beta_1\\ \beta_2\\ \beta_3\\ \vdots\\ \beta_n \end{bmatrix}U \\ Y=\begin{bmatrix}1&0&0&\cdots&0\end{bmatrix}X+\beta_0U \end{cases}$$ 如果,输入变量不含高阶导数项,那么数学模型写作:$$y^{(n)} +a_1y^{(n-1)} + \cdots +a_ny^{(0)}=bu$$ 状态空间模型写作:$$\begin{pmatrix} \dot y \\ \ddot y \\ \vdots \\ y^{(n)}\end{pmatrix} = \begin{bmatrix} 0&1&0&\cdots&0 \\ 0&0&1&\cdots&0 \\ \vdots&\vdots&\vdots&\ddots&\vdots \\ -a_n&-a_{n-1}&-a_{n-2}&\cdots&-a_1 \end{bmatrix} \begin{pmatrix} y \\ \dot y\\ \vdots \\ y^{(n-1)}\end{pmatrix}+ \begin{bmatrix} 0 \\ 0 \\ \vdots \\ b\end{bmatrix}u$$
显然,不含输入导数项的物理方程更容易被用来构建状态空间模型
Example¶
对于高阶微分方程:$\dddot y + 3\ddot y + 5\dot y + 7y = 2\dot u + 4u$,有:$$\begin{cases}A=\begin{bmatrix} 0&1&0\\0&0&1\\-7&-5&-3\end{bmatrix} B=\begin{bmatrix} 0\\2\\-2\end{bmatrix}\\C=\begin{bmatrix}1&0&0\end{bmatrix} \end{cases}$$
A=[0 1 0; 0 0 1; -7 -5 -3];
B=[0;2;-2];
C=[1 0 0];
sys=ss(A,B,C,[]);% state space model
tf(sys) % transfer function
ans =
2 s + 4
---------------------
s^3 + 3 s^2 + 5 s + 7
Continuous-time transfer function.
- 输入输出传递函数模型¶
在线性空间里,我们对物理方程的输入输出项取拉普拉斯变换,从而等到频域内输入输出传递函数:$$G(s)=\frac{Y(s)}{U(s)}=\frac{b_0s^n+b_1s^{n-1}+\cdots+b_ns}{a_0s^n+a_1s^{n-1}+\cdots+a_ns}=G_{\Sigma(A,B,C)}(s)+\frac{b_0}{a_0}$$
于是,我们称方程$a_0s^n+a_1s^{n-1}+\cdots+a_ns=0$为系统的特征方程,方程的根被称为特征值或极点(Pole point),相应地,方程$b_0s^n+b_1s^{n-1}+\cdots+b_ns=0$的根被称为零点(Zero point)。
当分母被写作$s^2+a_1s+a_2$时,有$\omega=\sqrt{a_2},\xi=\frac{a_1}{2\omega}$,$\omega$被称作固有频率,$\xi$被称作阻尼比。$\xi=1$表示临界阻尼,当$\xi>1$时,系统有大阻尼比。

- 如果传递函数$G_{\Sigma(A,B,C)}(s)$中,极点互异(不重根)时,传递函数可写作:
令:$\begin{cases} X_i(s)=\frac{1}{s-s_i}U(s) \Rightarrow \dot x_i=s_ix_i + u \\ Y(s)=\sum k_iX_i(s)+Du \Rightarrow y=k_1x_1+k_2x_2+\cdots+k_nx_n+Du\end{cases}$
$$\Rightarrow \begin{cases}\dot X=\begin{bmatrix}s_1&&&\\&s_2&&\\&&\ddots&\\&&&s_n\end{bmatrix}X+\begin{bmatrix}1\\1\\ \vdots\\1\end{bmatrix}u \\ Y=\begin{bmatrix}k_1&k_2&\cdots&k_n\end{bmatrix}X+Du\end{cases}$$
- 如果重极点存在,如:$G(s)=\frac{k_{11}}{(s-s_1)^3}+\frac{k_{12}}{(s-s_1)^3}+\frac{k_{13}}{(s-s_1)^3}+\frac{k_{41}}{(s-s_4)^3}+\frac{k_{51}}{(s-s_5)^3}+\frac{k_{52}}{(s-s_5)^3}$,$s_1$有3个重根,$s_5$有2个重根。
令:$X_1(s)=\frac{U(s)}{(s-s_1)^3}=\frac{X_2(s)}{s-s_1}\Rightarrow\dot X_1=s_1X_1+S_2$ $$\Rightarrow \begin{cases}\dot X=\begin{bmatrix} s_1&1\\&s_1&1\\&&s_1\\&&&s_4\\&&&&s_5&1\\&&&&&s_5\end{bmatrix}X+\begin{bmatrix}0\\0\\1\\1\\0\\1\end{bmatrix}u \\ Y=\begin{bmatrix}k_{11}&k_{12}&\cdots&k_{52}\end{bmatrix}X\end{cases}$$
- 如果存在零极点对(零极点重合),则相应零极点对相消。
sys_min=minreal(sys)
显然,我们可以发现,对于输入量含有导数项的物理方程,我们通过构建输入输出传递函数获得状态空间模型更加容易一些。
但是,输入输出传递函数模型只能建立单输入单输出系统(SISO),因此,通常对于多输入多输出系统(MIMO),我们需要对每一个输入输出的组合构建一个传递函数模型
Example¶
仍对于这个高阶微分方程$\dddot y + 3\ddot y + 5\dot y + 7y = 2\dot u + 4u$,拉普拉斯变换后,得: $$G(s)=\frac{Y(s)}{U(s)}=\frac{2s+4}{s^3+3s^2+5s+7}$$ 有:
num=[2 4];den=[1 3 5 7];
num=[2 4];den=[1 3 5 7];
system_1=tf(num,den)
system_1 =
2 s + 4
---------------------
s^3 + 3 s^2 + 5 s + 7
Continuous-time transfer function.
状态空间模型转化为传递函数模型¶
状态空间模型:$$\begin{cases}\dot X = AX + BU \\Y = CX + DU \end{cases}\Rightarrow \begin{cases}sX = AX + BU \\Y = CX + DU \end{cases}$$
传递函数模型:$$G(s)=\frac{Y(s)}{U(s)}=C(sI-A)^{-1}B+D$$
system_2=tf(sys)
system_2 =
2 s + 4
---------------------
s^3 + 3 s^2 + 5 s + 7
Continuous-time transfer function.
- 流程图模型¶
以双输入双输出为例:
$\begin{cases}\ddot y_1 +a_1\dot y_1 +a_2y_2 =b_1\dot u_1 +b_2u_1 +b_3u_2 \\ \dot y_2 +a_3y_2 +a_4y_1 =b_4u_2\end{cases}$
$\Rightarrow$
$\begin{cases}y_1=\lmoustache(-a_1y_1+b_1u_1)dt +\lmoustache\lmoustache(b_2u_1+b_3u_2-a_2y_2)dt^2 \\ y_2=\lmoustache(-a_3y_2-a_4y_1+b_4u_2)dt\end{cases}$
把每一次积分结果看作是状态变量得一项,则:
$\begin{cases}\dot x_1=-a_1x_1+x_2+b_1u_1 \\ \dot x_2=-a_2x_3+u_1b_2+u_2b_3 \\ \dot x_3=-a_4x_1-a_3x_3+u_2b_4 \\ y_1=x_1\\y_2=x_3\end{cases}$
$\Rightarrow$
$\begin{cases}\dot X=\begin{bmatrix}-a_1&1&0\\0&0&-a_2\\-a_4&0&-a_3\end{bmatrix}X +\begin{bmatrix}b_1&0\\b_2&b_3\\0&b_4\end{bmatrix} \begin{pmatrix}u_1\\u_2\end{pmatrix} \\ Y=\begin{bmatrix}1&0&0\\0&0&1\end{bmatrix}X\end{cases}$
显然,对于MIMO系统,相比于输入输出传递函数模型,流程图模型,更容易构建状态空间模型。
线性系统组合模型¶
- 并联:$G(s)=G_1(s)+G_2(s)$
parallel(sys1,sys2)
- 串联:$G(s)=G_1(s)G_2(s)$
series(sys1,sys2)
- 反馈:$G(s)=(I+G_1(s)G_2(s))^{-1}G_1(s)$
feedback(sys1,sys2)
- 非线性系统模型¶
相比于线性系统,非线性系统是更加普遍的系统。通常非线性系统是无法直接地写出其状态空间模型。它首先需要被线性化,我们才能在某一个平衡点附近写出近似状态空间模型。
以动力学方程为例:
$$A(q)\ddot q+C(q,\dot q)\dot q+g(q)=Qu$$
状态变量$x=[q,\dot q]^T$在平衡点$x_e=[q_e,0]^T$处有稳定输入 $u_e$。
则:
$$\dot X=F(x)+G(x)u=\begin{bmatrix} \dot q \\ A(q)^{-1}(-C(q,\dot q)\dot q-g(q))\end{bmatrix} +\begin{bmatrix} 0 \\ A(q)^{-1}Q\end{bmatrix}u$$
Example 倒立摆¶
$$\begin{cases} (J+ml^2)\frac{d^2\theta}{dt^2}+(mlcos\theta)\frac{d^2x}{dt^2}=mldsin\theta \\ (M+m)\frac{d^2x}{dt^2}+\mu_c\frac{dx}{dt}+(mlcos\theta)\frac{d^2\theta}{dt^2}=u+mlsin\theta(\frac{d\theta}{dt})^2\end{cases}$$状态空间模型的线性变换和Jordan规范型¶
为了降低系统分析和设计的难度,把一般形式的状态空间模型变换成为特定形式的模型,并且不改变系统本身的特性(传输特性),这个过程被称作状态空间模型的线性变换。Jordan规范型是其中一种特定形式的模型。
- 线性变换
原始状态空间模型:$$\sum(A,B,C,D):\begin{cases}\dot X = AX + BU \\Y = CX + DU \end{cases}$$
经线性变换:$\bar{X}=PX$
得:$$\sum(\bar{A},\bar{B},\bar{C},\bar{D}):\begin{cases} \dot {\bar{X}} = \bar{A} \bar{X} + \bar{B} U \\ Y = \bar{C} \bar{X} + \bar{D} U \end{cases}$$
则:
$$\bar{A}=PAP^{-1},\bar{B}=PB,\bar{C}=CP^{-1},bar{D}=D$$
那么:$$\bar{G}=\frac{Y}{U}=\bar{C}(sI-\bar{A})^{-1}\bar{B}+\bar{D}=C(sI-A)^{-1}B+D=G$$
matlab函数为:
sys_new=ss2ss(sys_old,P)
- 对角线规范化
将系统矩阵A化为对角线矩阵,意味着$\bar{A}$为矩阵A得特征值矩阵,因此,利用matlab函数:
[P,D]=eig(A)
得到对角线矩阵$D=\bar{A}=PAP^{-1}$
- Jordan规范化
由matlab函数:
[P,J]=jordan(A)
得到Jordan矩阵$J=\bar{A}=PAP^{-1}$
A = [1 -3 -2; -1 1 -1; 2 4 5]
[P,J]=jordan(A)
A =
1 -3 -2
-1 1 -1
2 4 5
P =
-1 1 -1
-1 0 0
2 0 1
J =
2 1 0
0 2 0
0 0 3