Simluation of a Simple Mass-Spring-Damper System
with a Disturbance Force
MCHE 485: Mechanical Vibrations
Dr. Joshua Vaughan
joshua.vaughan@louisiana.edu
http://www.ucs.louisiana.edu/~jev9637/
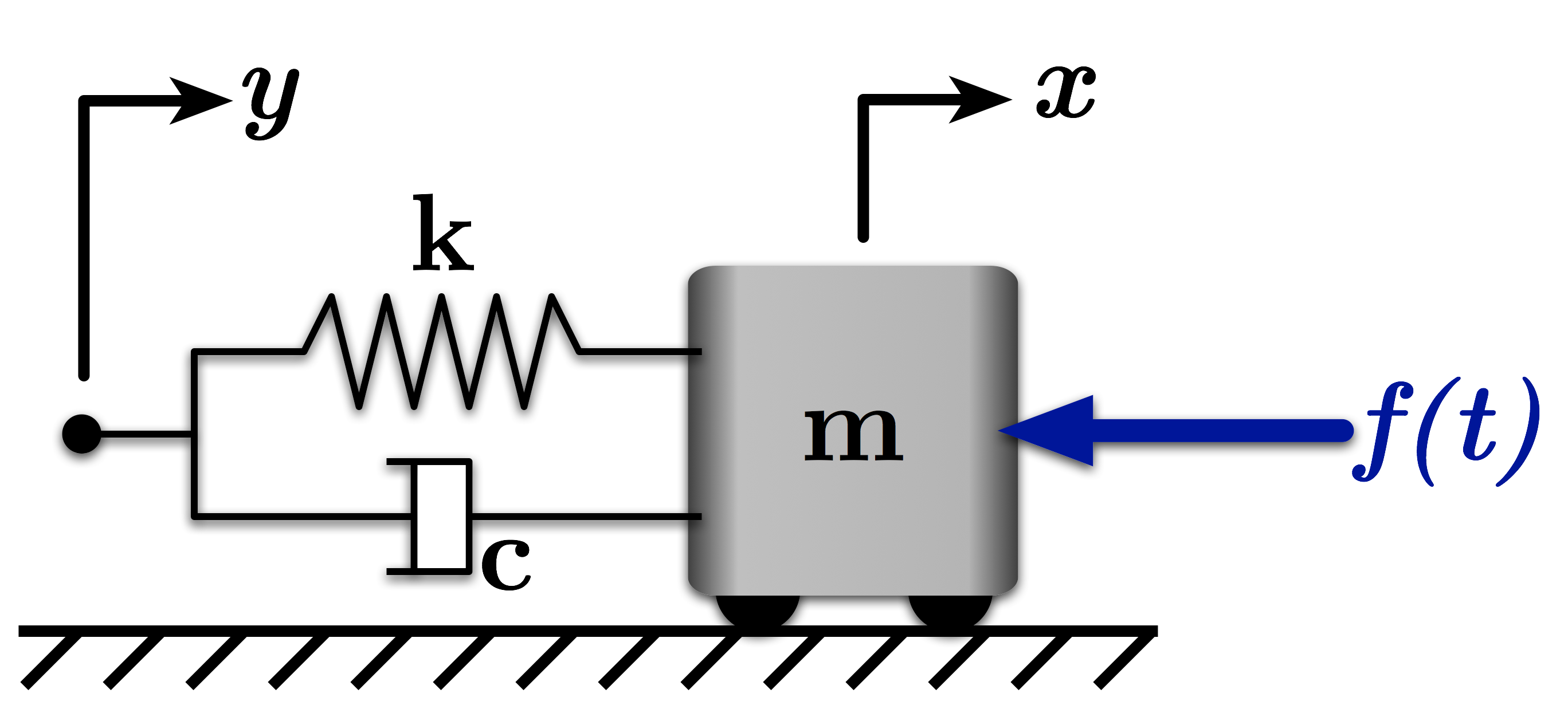
Figure 1: A Mass-Spring-Damper System with a Disturbance Force
This notebook simluates a the simple mass-spring-damper model like the one shown in Figure 1. The system has both a position input $y(t)$ and a force input, $f(t)$. This system could also be used to model the position control of a mass via a Proportional Derivative (PD) controller.
The equationof motion for this system is:
$ \quad m\ddot{x} + c \dot{x} + k x = c \dot{y} + k y - f $
We can also rewrie this in terms of damping ratio, $\zeta$, and natural frequency, $\omega_n$:
$ \quad \ddot{x} + 2 \zeta \omega_n \dot{x} + \omega_n^2 x = \zeta \omega_n \dot{y} + \omega_n^2 y - \frac{f}{m} $
However, as we'll see below, we often will collect terms so that our ''motion'' variable are all on the left-hand side, like:
$ \quad \ddot{x} = \frac{k}{m}\left( y - x \right) + \frac{c}{m} \left(\dot{y} - \dot{x} \right) - \frac{f}{m} $
import numpy as np
%matplotlib inline
# Import the plotting functions
import matplotlib.pyplot as plt
# Import the ODE solver
from scipy.integrate import odeint
Functions defining the equations of motion and inputs¶
We will first define the functions that define the equations of motion and the inputs. One "trick" that we will use is to define $y(t)$ and $\dot{y}(t)$ as states. This allows us to specifiy an acceleration input $\ddot{y}(t)$, which gets propogated to the $y(t)$ and $\dot{y}(t)$ via the equations of motion (or state-transition matrix if we were solving in "true" matrix-based state-space form).
So, we can then define our states as vector $ \bar{w} = \left[x \ \dot{x} \ y \ \dot{y}\right]^T $ and the inputs as $\bar{u} = \left[\ddot{y} \ f \right]$.
Then the system of first-order ODEs we have to solve is:
$ \quad \dot{\bar{w}} = g(\bar{w}, \bar{u}, t) $
Writing these out, we have:
$ \quad \dot{\bar{w}} = \left[\dot{x} \right.$
$\phantom{\quad \dot{\bar{w}} = \left[\right.} \frac{k}{m}(y - x) + \frac{c}{m}\left(\dot{y} - \dot{x}\right) - \frac{f}{m} $
$\phantom{\quad \dot{\bar{w}} = \left[\right.} \dot{y}$
$\phantom{\quad \dot{\bar{w}} = \left[\right.} \left.\ddot{y}\right]$
Notice that the $\ddot{y}$ in the last line is what we get to specify to generate the position input. In addition to allowing us to only specify one input that gets propograted to y and $\dot{y}$, describing inputs in the acceleration domain is often preferrable. This is because representing a realistic input in this domain is often easier than in the position or velocity domain.
def eq_of_motion(w, t, p):
"""
Defines the differential equations for the coupled spring-mass system.
Arguments:
w : vector of the state variables:
t : time
p : vector of the parameters:
"""
x, x_dot, y, y_dot = w
m, k, c, Distance, StartTime, Amax, Vmax, DistStart, F_amp = p
# Create sysODE = (x', x_dot', y', y_dot')
sysODE = [x_dot,
k/m * (y - x) + c/m * (y_dot - x_dot) - f(t, p)/m,
y_dot,
y_ddot(t, p)]
return sysODE
def f(t, p):
"""
defines the disturbance force input to the system
"""
m, k, c, Distance, StartTime, Amax, Vmax, DistStart, F_amp = p
# Select one of the two inputs below
# Be sure to comment out the one you're not using
# Input Option 1:
# Just a step in force beginning at t=DistStart
# f = F_amp * (t >= DistStart)
# Input Option 2:
# A pulse in force beginning at t=DistStart and ending at t=(DistStart+0.1)
f = F_amp * (t >= DistStart) * (t <= DistStart + 0.1)
return f
def y_ddot(t, p):
"""
Defines the accel input to the system.
Depending on the desired move distance, max accel, and max velocity, the input is either
bang-bang or bang-coast-bang
"""
m, k, c, Distance, StartTime, Amax, Vmax, DistStart, F_amp = p
# These are the times for a bang-coast-bang input
t1 = StartTime
t2 = (Vmax/Amax) + t1
t3 = (Distance/Vmax) + t1
t4 = (t2 + t3) - t1
if t3 <= t2: # command should be bang-bang, not bang-coast-bang
t2 = np.sqrt(Distance/Amax)+t1
t3 = 2*np.sqrt(Distance/Amax)+t1
accel = Amax*(t > t1) - 2*Amax*(t > t2) + Amax*(t > t3)
else: # command is bang-coast-bang
accel = Amax*(t > t1) - Amax*(t > t2) - Amax*(t > t3) + Amax*(t > t4)
return accel
# Define the parameters for simluation
m = 1.0 # mass (kg)
k = (1.0*2*np.pi)**2 # spring constant (N/m)
wn = np.sqrt(k/m) # natural frequency (rad/s)
# Select damping ratio and use it to choose an appropriate c
zeta = 0.05 # damping ratio
c = 2*zeta*wn*m # damping coeff.
# ODE solver parameters
abserr = 1.0e-9
relerr = 1.0e-9
max_step = 0.01
stoptime = 10.0
numpoints = 10001
# Create the time samples for the output of the ODE solver
t = np.linspace(0.,stoptime,numpoints)
# Initial conditions
x_init = 0.0 # initial position
x_dot_init = 0.0 # initial velocity
y_init = 0.0
y_dot_init = 0.0
# Set up the parameters for the input function
Distance = 1.0 # Desired move distance (m)
Amax = 20.0 # acceleration limit (m/s^2)
Vmax = 2.0 # velocity limit (m/s)
StartTime = 0.5 # Time the y(t) input will begin
DistStart = 4.5 # Time the disturbance input will begin
F_amp = 100.0 # Amplitude of Disturbance force (N)
# Pack the parameters and initial conditions into arrays
p = [m, k, c, Distance, StartTime, Amax, Vmax, DistStart, F_amp]
x0 = [x_init, x_dot_init, y_init, y_dot_init]
# Call the ODE solver.
resp = odeint(eq_of_motion, x0, t, args=(p,), atol=abserr, rtol=relerr, hmax=max_step)
# Make the figure pretty, then plot the results
# "pretty" parameters selected based on pdf output, not screen output
# Many of these setting could also be made default by the .matplotlibrc file
fig = plt.figure(figsize=(6,4))
ax = plt.gca()
plt.subplots_adjust(bottom=0.17,left=0.17,top=0.96,right=0.96)
plt.setp(ax.get_ymajorticklabels(),family='serif',fontsize=18)
plt.setp(ax.get_xmajorticklabels(),family='serif',fontsize=18)
ax.spines['right'].set_color('none')
ax.spines['top'].set_color('none')
ax.xaxis.set_ticks_position('bottom')
ax.yaxis.set_ticks_position('left')
ax.grid(True,linestyle=':',color='0.75')
ax.set_axisbelow(True)
plt.xlabel('Time (s)',family='serif',fontsize=22,weight='bold',labelpad=5)
plt.ylabel('Position (m)',family='serif',fontsize=22,weight='bold',labelpad=10)
# plt.ylim(-1.,1.)
# plot the response
plt.plot(t,resp[:,0], linewidth=2, linestyle = '-', label=r'$x$')
plt.plot(t,resp[:,2], linewidth=2, linestyle = '--', label=r'$y$')
# If there is a non-zero force disturbance show where it began via an annotation
if F_amp > 0:
plt.annotate(r'Force Disturbance Begins',
xy=(DistStart,resp[-1,2]), xycoords='data',
ha='center',
xytext=(DistStart, 1.05*np.max(resp[:,0])), textcoords='data', fontsize=16,
arrowprops=dict(arrowstyle="simple, head_width = 0.35, tail_width=0.05", connectionstyle="arc3", color="black"),color = "black")
leg = plt.legend(loc='upper right', fancybox=True)
ltext = leg.get_texts()
plt.setp(ltext,family='Serif',fontsize=16)
# Adjust the page layout filling the page using the new tight_layout command
plt.tight_layout(pad=0.5)
# If you want to save the figure, uncomment the commands below.
# The figure will be saved in the same directory as your IPython notebook.
# Save the figure as a high-res pdf in the current folder
# plt.savefig('MassSpringDamper_Disturbance_Resp.pdf')
fig.set_size_inches(9, 6) # Resize the figure for better display in the notebook

Forces¶
We can also easily take a look at the forces acting on the system.
The forces resulting from the position input are just the force from the spring, $F_{sp}$, and the force from damper, $F_{d}$:
$ \quad F_{pos} = F_{sp} + F_{d} = k \left(y - x\right) + c \left(\dot{y} - \dot{x}\right) $
Fsp = k * (resp[:,2] - resp[:,0]) # Spring Force (N)
Fd = c * (resp[:,3] - resp[:,1]) # Damping Force (N)
F_pos = Fsp + Fd
# Calculate the disturbance force over time by calling the disturbance force function
F_dist = np.zeros_like(t)
for ii in range(len(t)):
F_dist[ii] = -f(t[ii],p)
# Make the figure pretty, then plot the results
# "pretty" parameters selected based on pdf output, not screen output
# Many of these setting could also be made default by the .matplotlibrc file
fig = plt.figure(figsize=(6,4))
ax = plt.gca()
plt.subplots_adjust(bottom=0.17,left=0.17,top=0.96,right=0.96)
plt.setp(ax.get_ymajorticklabels(),family='serif',fontsize=18)
plt.setp(ax.get_xmajorticklabels(),family='serif',fontsize=18)
ax.spines['right'].set_color('none')
ax.spines['top'].set_color('none')
ax.xaxis.set_ticks_position('bottom')
ax.yaxis.set_ticks_position('left')
ax.grid(True,linestyle=':',color='0.75')
ax.set_axisbelow(True)
plt.xlabel('Time (s)',family='serif',fontsize=22,weight='bold',labelpad=5)
plt.ylabel('Force (N)',family='serif',fontsize=22,weight='bold',labelpad=10)
# You may need to reset these limits based on the forces in your simulation
ymax = 1.1 * np.max([np.max(np.abs(F_pos)), np.max(np.abs(F_dist))])
plt.ylim(-ymax, ymax)
# plot the response
plt.plot(t,F_pos, linewidth=2, linestyle = '-', label=r'Spring-Damper')
plt.plot(t,F_dist, linewidth=2, linestyle = '--', label=r'Disturbance')
leg = plt.legend(loc='best', fancybox=True)
ltext = leg.get_texts()
plt.setp(ltext,family='Serif',fontsize=16)
# Adjust the page layout filling the page using the new tight_layout command
plt.tight_layout(pad=0.5)
# If you want to save the figure, uncomment the commands below.
# The figure will be saved in the same directory as your IPython notebook.
# Save the figure as a high-res pdf in the current folder
# plt.savefig('MassSpringDamper_Disturbance_Forces.pdf')
fig.set_size_inches(9, 6)
# Resize the figure for better display in the notebook

Licenses¶
Code is licensed under a 3-clause BSD style license. See the licenses/LICENSE.md file.
Other content is provided under a Creative Commons Attribution-NonCommercial 4.0 International License, CC-BY-NC 4.0.
# This cell will just improve the styling of the notebook
# You can ignore it, if you are okay with the default sytling
from IPython.core.display import HTML
import urllib.request
response = urllib.request.urlopen("https://cl.ly/1B1y452Z1d35")
HTML(response.read().decode("utf-8"))