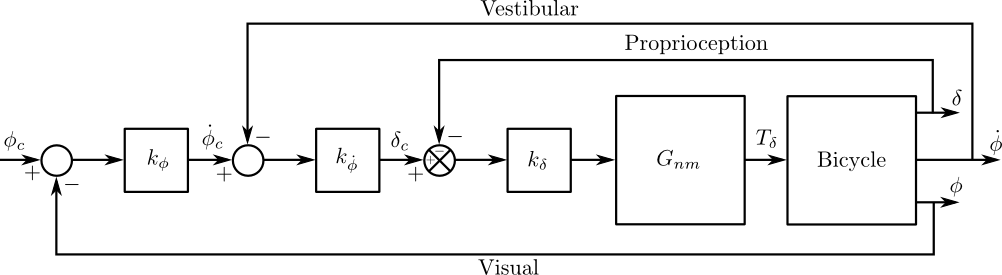
This document describes an attempt to solve for the gains of the first two loops of this block diagram to ensure that at a pair of the poles end up in a desired location.
where
$$G_{nm}(s) = \frac{\omega_{nm}^2}{s^2 + 2\zeta_{nm}\omega_{nm}s + \omega_{nm}^2}$$and the bicycle block is the linearized Whipple model as presented in Meijaard 2007.
Setup¶
import os
import dill
from IPython.display import display, Math
from sympy import MatrixSymbol, Eq, simplify, Poly, det, latex, S, solve, cse
from dtk import bicycle
import bicycleparameters as bp
The roll_rate_loop.py file builds the bicycle state space, the neuromuscular state space, and finally the state equations for the closed loop system when the steering angle and roll rate feedback loops are closed.
%run roll_rate_loop.py
State Space Definitions¶
The bicycle state equations take this general form:
[Eq(MatrixSymbol('{}_b'.format(v), *b[v].shape), b[v]) for v in ['A', 'x', 'B', 'u']]
The second order neuromuscular model can be put in this state space form:
[Eq(MatrixSymbol('{}_nm'.format(v), *n[v].shape), n[v]) for v in ['A', 'x', 'B', 'u']]
The closed loop state equations for the first two loops that are closed around the combine neuromuscular and bicycle model then become:
[Eq(MatrixSymbol('{}_cl'.format(v), *c[v].shape), c[v]) for v in ['A', 'x', 'B', 'u']]
Characteristic Equation¶
The characteristic equation can be formed for this closed loop system and converted to a polynomial.
s = Symbol('s')
char_eq = det(c['A'] - s * eye(c['A'].shape[0])).as_poly(s)
char_eq
Additionally, the coefficients to the 6th order polynomial can be extracted and simplified:
for i, coeff in enumerate(char_eq.coeffs()):
display(Math(r'$s^{}: {}$'.format(len(char_eq.coeffs()) - i - 1, latex(simplify(coeff)))))
The symbolic form of the characteristic equation cannot be easily factored.
char_eq.factor()
Solve for the gains¶
There are two control gains, $k_\delta$ and $k_{\dot{\phi}}$, that are the unknowns. We'd like to find the value of the two gains such that the weave poles when there is no feedback, i.e. $k_\delta=0$ and $k_{\dot{\phi}}=0$, shift to a pair of poles when there is feedback that are located at a damping ratio of 0.15 and a natural frequency of 10 rad/s. This pair of poles gives a desired second order system:
desired_second_order = Poly((s**2 + 2 * S(15)/100 * 10 * s + 10**2), s)
desired_second_order
This pair of poles must be accompanied by four more poles to equate to the sixth order system above. The desired sixth order system with arbitrary coefficients is then:
c0, c1, c2, c3 = symbols('c0, c1, c2, c3')
desired_six_order = Poly(s**4 + c3 * s**3 + c2 * s**2 + c1 * s + c0, s) * desired_second_order
desired_six_order
The coefficients of the desired polynomial and the one formed from the closed loop system can then be substracted from each other to solve for the unknowns: $c_0, c_1, c_2, c_3, k_\delta, k_{\dot{\phi}}$. This gives 6 equations for the six unknowns.
zero = Matrix((char_eq - desired_six_order).coeffs())
zero
The following loads in the numerical parameters for the benchmark bicycle traveling at 5 m/s, for futher use.
A_benchmark, B_benchmark = bicycle.benchmark_state_space(*bicycle.benchmark_matrices(), 5.0, 9.81)
A_benchmark, B_benchmark
(array([[ 0. , 0. , 1. , 0. ],
[ 0. , 0. , 0. , 1. ],
[ 9.48977445, -22.85146663, -0.52761225, -1.65257699],
[ 11.71947687, -18.38412373, 18.38402617, -15.42432764]]),
array([[ 0. , 0. ],
[ 0. , 0. ],
[ 0.01593498, -0.12409203],
[-0.12409203, 4.32384018]]))
Create a dictionary that can be used to substitute the numerical values for the benchmark bicycle.
par = {k: v for k, v in zip(b['A'], A_benchmark.flatten()) if isinstance(k, Symbol)}
par[omega] = 30
par[zeta] = 0.707
par[b['B'][2, 1]] = B_benchmark[2, 1]
par[b['B'][3, 1]] = B_benchmark[3, 1]
par
The following shows the form of the six equations that must be solved to find the gains and the other coefficients. The equations are linear in the $c$ coefficients and nonlinear in the gains. Notice that the gains are only in the last four equations.
zero.subs(par)
Now we can attempt to solve for the gains analytically. This set of equations are polynomials in the unknowns and may have an analytica solution. First we solve the first two linear equations for $c_2$ and $c_3$ and substitute them into the last four equations.
c2_c3_sol = solve(zero[:2], c2, c3)
c2_c3_sol
lastfour = simplify(zero[2:, :].subs(c2_c3_sol))
lastfour
The following caches the result of the solve command to disk because it takes so long (about 4 hours on my machine) to compute.
CPU times: user 3h 56min 9s, sys: 832 ms, total: 3h 56min 10s
Wall time: 3h 56min 12s
%%time
fname = "sol.p"
if os.path.isfile(fname):
with open(fname, 'rb') as f:
sol = dill.load(f)
else:
sol = solve(lastfour, c0, c1, k_delta, k_phi_dot)
with open(fname, "wb") as f:
dill.dump(sol, f)
CPU times: user 424 ms, sys: 4 ms, total: 428 ms Wall time: 430 ms
The solution is returned as a list of lists, so stick it in a dictionary for future use.
sol = {k: v for k, v in zip((c0, c1, k_delta, k_phi_dot), sol[0])}
Generate a Python function¶
Next I generate an efficient Python function that evaluates the found expressions for $k_\delta$ and $k_\dot{\phi}$.
py_func_template = '''\
def compute_inner_gains(A, B, omega_nm, zeta_nm):
"""Returns the steer and roll rate gains given the state and input
matrices of the bicycle and the neuromuscular block's natural
frequency and damping ratio.
Parameters
==========
A : array_like, shape(4, 4)
The state matrix for a linear Whipple bicycle model, where
the states are [roll angle, steer angle, roll angular rate,
steer angular rate].
B : array_like, shape(4, 2)
The input matrix for a linear Whipple bicycle model, where
the inputs are [roll torque, steer torque].
omega_nm : float
The natural frequency of the neuromuscular model.
zeta_nm : float
The damping ratio of the neuromuscular model.
Returns
=======
k_delta : float
The steer angle feedback gain.
k_phi_dot : float
The roll rate feedback gain.
"""
{matrix_expansion}
{sub_exprs}
{main_exprs}
return k_delta, k_phi_dot\
'''
sub_exprs, main_exprs = cse([sol[k_delta], sol[k_phi_dot]])
zero_syms = zero.free_symbols
matrix_expansion = []
for mat in ['A', 'B']:
for i, row in enumerate(b[mat].tolist()):
for j, col in enumerate(row):
if col in zero_syms:
matrix_expansion.append('{} = {}[{}, {}]'.format(col, mat, i, j))
sub_exprs_txt = ['{} = {}'.format(x, y) for x, y in sub_exprs]
main_exprs_txt = ' k_delta = {}\n\n k_phi_dot = {}'.format(*main_exprs)
The full function is shown below:
func_txt = py_func_template.format(matrix_expansion='\n '.join(matrix_expansion),
sub_exprs='\n '.join(sub_exprs_txt),
main_exprs=main_exprs_txt)
print(func_txt)
def compute_inner_gains(A, B, omega_nm, zeta_nm):
"""Returns the steer and roll rate gains given the state and input
matrices of the bicycle and the neuromuscular block's natural
frequency and damping ratio.
Parameters
==========
A : array_like, shape(4, 4)
The state matrix for a linear Whipple bicycle model, where
the states are [roll angle, steer angle, roll angular rate,
steer angular rate].
B : array_like, shape(4, 2)
The input matrix for a linear Whipple bicycle model, where
the inputs are [roll torque, steer torque].
omega_nm : float
The natural frequency of the neuromuscular model.
zeta_nm : float
The damping ratio of the neuromuscular model.
Returns
=======
k_delta : float
The steer angle feedback gain.
k_phi_dot : float
The roll rate feedback gain.
"""
a_20 = A[2, 0]
a_21 = A[2, 1]
a_22 = A[2, 2]
a_23 = A[2, 3]
a_30 = A[3, 0]
a_31 = A[3, 1]
a_32 = A[3, 2]
a_33 = A[3, 3]
b_21 = B[2, 1]
b_31 = B[3, 1]
x0 = omega_nm**2
x1 = 10000*b_31
x2 = 91*b_31
x3 = a_20*b_21
x4 = 300*a_22*b_21
x5 = 100*b_31
x6 = a_31*b_21
x7 = a_20*a_31*b_21
x8 = a_21*b_31
x9 = a_30*b_21
x10 = b_31**2
x11 = a_21*x10
x12 = b_21**2
x13 = a_30*x12
x14 = 300*a_32
x15 = 3*b_31
x16 = a_20*a_33*b_21
x17 = a_22*a_33*b_21
x18 = a_23*a_30*b_21
x19 = a_23*a_32*b_21
x20 = a_23*x10
x21 = 3*a_33
x22 = 100*a_32
x23 = 91000000*b_21
x24 = 1000000*x3
x25 = 738100*x8
x26 = a_22*b_21
x27 = 3000000*x26
x28 = 5730000*b_31
x29 = a_23*x28
x30 = 1738100*x6
x31 = a_33*b_21
x32 = 2730000*x31
x33 = a_20*a_21*b_31
x34 = 9100*x33
x35 = 30000*a_23
x36 = a_20*b_31
x37 = x35*x36
x38 = 19100*x7
x39 = 30000*x16
x40 = 57300*a_21*b_31
x41 = a_22*x40
x42 = a_21*a_30*b_21
x43 = 10000*x42
x44 = a_21*a_31*b_31
x45 = 9100*x44
x46 = a_33*x40
x47 = a_22*a_23*b_31
x48 = 910000*x47
x49 = 57300*a_22*b_21
x50 = a_31*x49
x51 = 90000*x17
x52 = 30000*a_31*b_31
x53 = a_23*x52
x54 = 1000000*x19
x55 = 910000*a_33*b_31
x56 = a_23*x55
x57 = 27300*a_33
x58 = x57*x6
x59 = b_21*omega_nm*zeta_nm
x60 = 6000000*x59
x61 = a_31**2
x62 = 9100*b_21
x63 = x61*x62
x64 = a_33**2
x65 = b_21*x64
x66 = 910000*x65
x67 = b_21*x0
x68 = 1000000*x67
x69 = 100*a_31
x70 = x33*x69
x71 = 300*a_33
x72 = x33*x71
x73 = 10000*a_23
x74 = a_20*a_33*b_31
x75 = x73*x74
x76 = x7*x71
x77 = 300*a_22
x78 = x44*x77
x79 = 9100*a_33
x80 = a_21*a_22*b_31
x81 = x79*x80
x82 = a_21*a_23*a_30*b_31
x83 = 300*x82
x84 = a_21*a_23*a_32*b_31
x85 = 900*x84
x86 = x42*x69
x87 = a_21*a_31*b_21
x88 = x14*x87
x89 = a_21*a_32*a_33*b_21
x90 = 10000*x89
x91 = 114600*omega_nm*zeta_nm
x92 = x8*x91
x93 = 10000*a_22*a_23*b_31
x94 = a_31*x93
x95 = a_22*a_33*b_31
x96 = x35*x95
x97 = 900*a_31
x98 = x17*x97
x99 = a_22*b_21*omega_nm*zeta_nm
x100 = 2000000*x99
x101 = 300*a_31
x102 = x101*x18
x103 = a_30*a_33*b_21
x104 = x103*x73
x105 = 9100*a_32
x106 = x105*x6
x107 = a_23*x106
x108 = a_32*a_33*b_21
x109 = x108*x35
x110 = omega_nm*zeta_nm
x111 = 1820000*b_31*x110
x112 = a_23*x111
x113 = x6*x91
x114 = 180000*a_33*b_21*x110
x115 = 100*x61
x116 = x115*x3
x117 = 10000*a_20*b_21
x118 = x117*x64
x119 = x0*x117
x120 = 9100*x0
x121 = x120*x8
x122 = a_21**2
x123 = a_30*x122
x124 = x123*x5
x125 = a_32*b_31*x122
x126 = 300*x125
x127 = x4*x61
x128 = 30000*x26*x64
x129 = b_31*x0
x130 = x129*x35
x131 = a_23**2
x132 = a_30*x131
x133 = x1*x132
x134 = a_32*b_31*x131
x135 = 30000*x134
x136 = a_31*b_21*x0
x137 = 19100*x136
x138 = 30000*x0*x31
x139 = 600*omega_nm*zeta_nm
x140 = x139*x33
x141 = 20000*a_23
x142 = a_20*b_31*omega_nm*zeta_nm
x143 = x141*x142
x144 = 18200*omega_nm*zeta_nm
x145 = x144*x80
x146 = x139*x42
x147 = x139*x44
x148 = 20000*omega_nm*zeta_nm
x149 = a_21*a_32*b_21
x150 = x148*x149
x151 = a_21*a_33*b_31*x144
x152 = 60000*omega_nm*zeta_nm
x153 = x152*x47
x154 = a_22*a_31*b_21*omega_nm*zeta_nm
x155 = 38200*x154
x156 = x152*x17
x157 = x148*x18
x158 = b_31*omega_nm*zeta_nm
x159 = 20000*a_31*x158
x160 = a_23*x159
x161 = 60000*a_33*x158
x162 = a_23*x161
x163 = 1800*omega_nm*zeta_nm
x164 = a_31*a_33*b_21*x163
x165 = 100*x0
x166 = x165*x33
x167 = 191*x0
x168 = x167*x7
x169 = 300*x0
x170 = x16*x169
x171 = x169*x80
x172 = 91*x0
x173 = x172*x42
x174 = x165*x44
x175 = x149*x169
x176 = a_21*b_31*x0
x177 = x176*x71
x178 = x0*x93
x179 = x169*x18
x180 = 10000*x0
x181 = x180*x19
x182 = a_33*x0*x1
x183 = a_23*x182
x184 = x136*x71
x185 = 600*b_21*omega_nm*zeta_nm
x186 = x185*x61
x187 = 60000*x59*x64
x188 = 200*a_33*omega_nm*zeta_nm
x189 = x188*x33
x190 = a_20*a_31*b_31*omega_nm*zeta_nm
x191 = 200*a_23*x190
x192 = 200*a_22*omega_nm*zeta_nm
x193 = x192*x44
x194 = a_21*a_22*a_33*b_31
x195 = x139*x194
x196 = x139*x84
x197 = x188*x42
x198 = 200*a_32*omega_nm*zeta_nm
x199 = x198*x87
x200 = 20000*a_33*omega_nm*zeta_nm
x201 = x200*x47
x202 = a_22*a_31*a_33*b_21*x139
x203 = 200*a_31*omega_nm*zeta_nm
x204 = x18*x203
x205 = a_23*a_31*a_32*b_21*x139
x206 = x19*x200
x207 = x115*x67
x208 = x180*x65
x209 = a_20*b_21*x0
x210 = x209*x61
x211 = x123*x129
x212 = a_31*x0
x213 = x212*x33
x214 = 3*a_31
x215 = a_20*a_23*b_31*x0*x214
x216 = 100*a_23*x0
x217 = x216*x74
x218 = a_20*a_31*b_21*x0
x219 = x21*x218
x220 = x165*x194
x221 = 3*x0
x222 = x221*x82
x223 = x212*x42
x224 = a_21*a_30*b_21*x0*x21
x225 = x165*x89
x226 = 200*omega_nm*zeta_nm
x227 = x125*x226
x228 = a_22*a_23*b_31*x0
x229 = x228*x69
x230 = 200*x61*x99
x231 = 20000*x64*x99
x232 = x103*x216
x233 = 100*a_23*a_32*x136
x234 = x134*x148
x235 = a_20*b_21*x165*x64
x236 = 100*b_31*x0
x237 = x132*x236
x238 = a_22*b_31
x239 = a_32*b_21
x240 = a_20*a_30*b_21
x241 = 573*a_31
x242 = a_21*a_32*b_31
x243 = a_22*a_30*b_21
x244 = a_23*a_30
x245 = a_20**2
x246 = b_31*x245
x247 = a_22**2
x248 = b_31*x247
x249 = 3*a_30
x250 = a_20*a_21*a_32*b_31
x251 = 9*a_20*a_22*b_31
x252 = a_20*a_22*a_33*b_31
x253 = a_20*a_23*a_30*b_31
x254 = 573*a_20*b_31
x255 = a_20*a_30*a_33*b_21
x256 = a_21*a_22*a_30*b_31
x257 = a_21*a_30*a_32*b_21
x258 = a_22*a_23*a_30*b_31
x259 = 91*a_22*a_30*b_21
x260 = a_22*a_30*a_33*b_21
x261 = 300*a_22*a_32*b_21
x262 = a_22*b_31*omega_nm*zeta_nm
x263 = a_23*a_30*a_32*b_21
x264 = a_30*b_21*omega_nm*zeta_nm
x265 = a_21*b_21
x266 = a_30**2
x267 = a_32**2
x268 = a_22*b_31*x0
x269 = a_23*x266
x270 = a_23*x267
x271 = a_30*b_21*x0
x272 = a_20*a_22*b_31*omega_nm*zeta_nm
x273 = 182*omega_nm*zeta_nm
x274 = 600*a_32*omega_nm*zeta_nm
x275 = 1146*omega_nm*zeta_nm
x276 = a_30*omega_nm*zeta_nm
x277 = 6*omega_nm*zeta_nm
x278 = 18*omega_nm*zeta_nm
x279 = 2*a_31*omega_nm*zeta_nm
x280 = a_33*b_31*x245
x281 = a_21*b_21*omega_nm*zeta_nm
k_delta = (-x100 - x102 + x104 - x107 - x109 - x112 - x113 - x114 - x116 - x118 + x119 - x121 - x124 + x126 + x127 + x128 - x130 - x133 + x135 + x137 + x138 + x140 - x143 + x145 - x146 + x147 + x150 + x151 + x153 - x155 - x156 + x157 - x160 + x162 + x164 - x166 + x168 + x170 + x171 - x173 - x174 - x175 + x177 - x178 - x179 + x181 - x183 - x184 - x186 - x187 + x189 - x191 + x193 - x195 + x196 - x197 + x199 + x201 + x202 + x204 - x205 + x206 + x207 + x208 + x210 + x211 - x213 + x215 - x217 - x219 + x220 - x222 - x223 + x224 - x225 - x227 - x229 - x23 - x230 - x231 - x232 + x233 - x234 + x235 + x237 - x24 + x25 + x27 + x29 - x30 - x32 + x34 + x37 - x38 - x39 - x41 + x43 + x45 - x46 + x48 + x50 + x51 + x53 - x54 + x56 + x58 - x60 - x63 - x66 + x68 + x70 - x72 + x75 + x76 - x78 - x81 + x83 - x85 + x86 - x88 + x90 + x92 + x94 - x96 - x98)/(x0*(-a_20*x11 + 3*a_20*x20 - 100*a_22*x20 - a_31*x13 - a_33*x12*x22 + b_21*x1 + b_31*x4 + b_31*x7 - 100*x11 - x12*x14 + x13*x21 - 91*x13 - x15*x16 - x15*x18 + x17*x5 + x19*x5 + x2*x3 + x5*x6 + x8*x9))
k_phi_dot = (2*a_20*a_21*b_31*x276 - 1719*a_20*a_22*b_31 - a_20*a_23*a_32*b_31*x221 + 200*a_21*b_31*x276 - a_22*a_30*a_31*b_21*x277 + a_22*a_33*b_21*x0*x22 - 182*a_23*a_32*x142 + a_23*a_32*x254 - a_31*x251 - a_31*x259 - a_31*x261 - 600*a_31*x262 + 182*a_31*x264 + 6*a_31*x272 - a_32*b_31*omega_nm*x141*zeta_nm + a_32*b_31*x35 + 200*a_32*x154 - a_32*x218 - a_32*x49 + 18200*a_32*x99 + a_33*b_31*x139*x247 + a_33*x2*x245 - a_33*x236*x247 + 6*b_21*omega_nm*x269*zeta_nm - 100*b_21*x0*x270 + 91*b_21*x269 + x0*x250 + x0*x251 + x0*x253 - x0*x254 + x0*x255 - x0*x256 + x0*x259 + x0*x261 - x0*x280 - x1*x244 + x101*x248 + x103*x172 - x103*x275 - 7381*x103 - x105*x17 + x105*x3 - x105*x47 + x106 + x108*x144 + x108*x169 - 57300*x108 - x111 - x120*x239 - 30000*x129 - x136*x22 - x14*x16 - 34762*x142 - x144*x248 - x159 + x16*x198 + x161 + x163*x95 + x165*x242 - x167*x74 - x169*x248 - x17*x274 - x176*x249 - x182 + x185*x270 - 382*x190 + x192*x242 - x203*x248 - x209*x22 + x212*x243 - x214*x240 + x214*x246 + x214*x271 + x22*x228 + x22*x7 + x221*x240 - x221*x246 + x221*x252 - x221*x260 + x221*x263 + x226*x258 + x236*x244 + x238*x57 + x238*x97 + 171900*x238 + x239*x91 + 738100*x239 + x240*x273 + x240*x279 - 573*x240 + x241*x36 - x241*x9 - x242*x77 - 10000*x242 - x243*x275 - 7381*x243 - x246*x273 - x246*x279 + 573*x246 + x248*x79 + 57300*x248 - x249*x33 - x250*x277 - 91*x250 - x252*x278 - 273*x252 - x253*x277 - 91*x253 - x255*x277 - 91*x255 + 100*x256 + x257*x277 - 9*x257 - 300*x258 - x260*x273 + 573*x260 - 54600*x262 - x263*x278 - 273*x263 + 14762*x264 + 3*x265*x266 + 300*x265*x267 - 2*x266*x281 - 200*x267*x281 - x268*x71 - 900*x268 - x269*x67 + x270*x62 + 573*x271 + 546*x272 + x274*x3 - x274*x47 + x274*x6 + x275*x74 + x277*x280 + x28 + 109443*x36 + x52 + x55 + 17381*x74 - 79443*x9)/(x100 + x102 - x104 + x107 + x109 + x112 + x113 + x114 + x116 + x118 - x119 + x121 + x124 - x126 - x127 - x128 + x130 + x133 - x135 - x137 - x138 - x140 + x143 - x145 + x146 - x147 - x150 - x151 - x153 + x155 + x156 - x157 + x160 - x162 - x164 + x166 - x168 - x170 - x171 + x173 + x174 + x175 - x177 + x178 + x179 - x181 + x183 + x184 + x186 + x187 - x189 + x191 - x193 + x195 - x196 + x197 - x199 - x201 - x202 - x204 + x205 - x206 - x207 - x208 - x210 - x211 + x213 - x215 + x217 + x219 - x220 + x222 + x223 - x224 + x225 + x227 + x229 + x23 + x230 + x231 + x232 - x233 + x234 - x235 - x237 + x24 - x25 - x27 - x29 + x30 + x32 - x34 - x37 + x38 + x39 + x41 - x43 - x45 + x46 - x48 - x50 - x51 - x53 + x54 - x56 - x58 + x60 + x63 + x66 - x68 - x70 + x72 - x75 - x76 + x78 + x81 - x83 + x85 - x86 + x88 - x90 - x92 - x94 + x96 + x98)
return k_delta, k_phi_dot
Check the results¶
Here, I make use of the function to calculate the gains to see if it gives reasonable answers. First, see what kind of results are returned for the benchmark bicycle traveling at 5 m/s.
exec(func_txt)
k_delta_sol, k_phi_dot_sol = compute_inner_gains(A_benchmark, B_benchmark, 30, 0.707)
gain_sol = {k_delta: k_delta_sol, k_phi_dot: k_phi_dot_sol}
gain_sol
This is a good sign. The roll rate gain is found to be a small negative number and the steer rate gain is larger and positive. But the values that we find for our paper are more like $k_\delta=45, k_\dot{\phi}=-0.08$ for the regular bicycles traveling at 5.0 m/s. But this more closely aligns with what I did in my dissertation (http://moorepants.github.io/dissertation/control.html#model-description). There I found that you could get the same closed loop results for the two loops and have some flexibility in choice of gains. In the case of the description in my dissertation I get very similar numbers as this. In fact I can check to see if I get the same values as in my dissertation.
real_bike = bp.Bicycle('Rigidcl', pathToData='/home/moorepants/src/BicycleParameters/data/')
We have foundeth a directory named: /home/moorepants/src/BicycleParameters/data/bicycles/Rigidcl. Found the RawData directory: /home/moorepants/src/BicycleParameters/data/bicycles/Rigidcl/RawData Recalcuting the parameters. The glory of the Rigidcl parameters are upon you!
/home/moorepants/src/BicycleParameters/bicycleparameters/com.py:55: VisibleDeprecationWarning: using a non-integer number instead of an integer will result in an error in the future cartesian(arrays[1:], out=out[0:m,1:]) /home/moorepants/src/BicycleParameters/bicycleparameters/com.py:57: VisibleDeprecationWarning: using a non-integer number instead of an integer will result in an error in the future out[j*m:(j+1)*m,1:] = out[0:m,1:]
real_bike.add_rider('Charlie')
There is no rider on the bicycle, now adding Charlie. No parameter files found, calculating the human configuration.
A_real_bike, B_real_bike = real_bike.state_space(5.0, nominal=True)
A_real_bike
array([[ 0. , 0. , 1. , 0. ],
[ 0. , 0. , 0. , 1. ],
[ 8.27673976, -19.24025703, -0.15126742, -1.27363532],
[ 19.96881539, -18.88653895, 8.74213104, -18.14135119]])
B_real_bike
array([[ 0. , 0. ],
[ 0. , 0. ],
[ 0.00965478, -0.09603994],
[-0.09603994, 5.55039373]])
compute_inner_gains(A_real_bike, B_real_bike, 30, 0.707)
Very nice! In my dissertation I found 17.5 and -0.44, so this does the same thing as my method. But it doesn't quite give the exact same results as what Ron's method gives in the paper. So we will need to investigate further.
Lastly, let's just check to see if this puts the poles where we wanted them to go:
eq = char_eq.subs(par).subs(gain_sol).as_poly(s)
eq.nroots()
desired_second_order.nroots()
The closed loop poles are exactly where they should be.